3.0 Other known steering theories and techniques compared to the new Torso-Arms-Handlebar theory:
You want to know more about the contribution and limits of other know steering theories and practices?
Then simply scroll down or click on a theory below to go straight down to it:
3.1 Keeping balance with torso leaning right or left
3.2 Gyroscopic reactions of the wheels and engine
3.3 Front fork geometry: Fork angle and Trail
3.4 Countersteering
3.5 Weight on the foot pegs and tightening up the knees
3.6 Lateral shift-out of the body at slow speeds
3.7 Knee extended out towards the direction where to go
3.8 Target fixation and How to counteract Target fixation
3.9 “Follow your line” on a mountain bike trail
3.10 Camber steer of the tires
3.11 Accelerate to straighten up the motorcycle
3.12 Straighten or lean the chassis in curves to go faster
3.13 Lean or Steer through a Series of Obstacles – Dilemma
3.14 Riding on rollers
3.15 Steering-Theories Wars and Contributions
3.1 Keeping balance with torso leaning right or left:
Contribution:
Above a certain minimum stable speed without hands on the handlebar, a 2-Wheeler can be steered leaning the torso right or left. Many riders thus have the impression that staying up and steering is a simple question of balance.
 Limits:
Limits:
– But how can we explain the major difference in steering ease and precision, between the cases with and without hands on the handlebar?
– And how can we explain that a 150 Kg plus (300 Lbs + ) rider on a delicate bicycle, steers as easily as a 45 Kg (90 Lbs) little lady on her big Harley?
– Or how can we explain that a motorcycle does not steer by body leaning sideways, when the hands are on the rigidly fixed handlebar of Keith Code’s No Body Steering Motorcycle? While with hands on the normal handlebar and without even conscious pushing-pulling of the handlebar, this motorcycle is steered easily, even at slow speeds. (See more on Keith Code and comparisons in below section 3.15 Steering-Theories Wars and Contributions)
And you don’t even need Keith Code’s No BS bike to test this: On a motorcycle at slow speed in high gear, you simply let go of the handlebar and grip the tank with your hands. Since the engine is not revving fast, it will not slow down the bike fast. So you can lean your torso sideways right and left, and observe that the bike will only go slightly sideways, due to the gyroscopic reactions on the handlebar. And if you put back your hands on the handlebar, you control your bike again, seamingly by magic.
3.2 Gyroscopic reactions of the wheels and engine:
Contribution:
– Gyroscopic reactions play a major role in keeping a 2-Wheeler standing up and steering WITHOUT hands on the handlebar.
– They also play an important role in supporting countersteering maneuvers WITH hands on the handlebar.
Limits:
– These gyroscopic reactions do not explain that the minimum stable speed WITHOUT hands on the handlebar is close to double the speed WITH hands on the handlebar.
– Also, they do not explain the major difference in steering ease and precision at all speeds, between the cases WITH and WITHOUT hands on the handlebar.
Better understanding of gyroscopic reactions:
 In order to observe its reactions, of a gyroscope can be bought or it can be borrowed from the physics department of a school. But it’s simpler to use a bicycle wheel (a motorcycle wheel is too heavy) supported by its axle while someone else makes it turn forward:
In order to observe its reactions, of a gyroscope can be bought or it can be borrowed from the physics department of a school. But it’s simpler to use a bicycle wheel (a motorcycle wheel is too heavy) supported by its axle while someone else makes it turn forward:
– If we lean it to the left around axis (1) on the figure, it will not lean to the left. It’s surprising at first sight, but the gyroscopic reactions will rather orient it towards the left around axis (2). It can even be proved mathematically.
– Similarly, if it’s oriented towards the left around axis (3), it will lean to the right around axis (4).
Note that the wheel does not let itself turn around axes (1) and (3) without generating a strong gyroscopic counter-reaction opposing these rotations.
Also note that if the wheel is turned 10 degrees around (1) or (3), it will not automatically turn 10 degrees around (2) and (4). It may turn more.
Effects of gyroscopic reactions on 2-Wheelers:
 A) If the rider puts his hands on the handlebar and his 2-Wheeler falls towards his left when going forward on the road, it’s now easy to understand the front wheel gyroscopic reactions:
A) If the rider puts his hands on the handlebar and his 2-Wheeler falls towards his left when going forward on the road, it’s now easy to understand the front wheel gyroscopic reactions:
This is the case where the front wheel is leaned around axis (1) of the gyroscope image, or (5) of the 2-Wheeler figure here. Thus, the front wheel is oriented towards the left around axis (2) of the gyroscope image, or (6) of the 2-Wheeler here. A centrifugal force (7) is then generated on the 2-Wheeler towards the right to straighten it back up. It can also be reasoned that the tire-to-ground contact patch moves towards the left under the 2-Wheeler to straighten it back up. In both cases, the front wheel gyroscopic reactions hold the 2-Wheeler against falling.
B) The rear wheel and the crankshaft plus flywheel of a transverse engine, will also lean around axis (5) and generate gyroscopic reactions around axis (6) of the 2-Wheeler. But the front wheel is in contact with the ground at about 1.5 meter (5 feet) forward of the rear wheel. This front wheel will thus hold the 2-Wheeler against freely turning left. However, these gyroscopic reactions can act against the front fork steering axis and around the front fork trail to help the front wheel orientation around axis (6), in order to hold the 2-Wheeler against falling.
C) If the 2-Wheeler leans, the centrifugal forces must be strong enough to bring it back to the vertical. The front wheel must thus turn fast enough so the gyroscopic reactions can be strong enough to orient the front wheel enough in the right direction and generate strong enough centrifugal forces. So a minimum speed must be attained before a 2-Wheeler can be stable WITHOUT hands on the handlebar. But the gyroscopic reactions themselves do not explain why this minimum speed is about twice as low WITH hands on the handlebar.
D) As speed increases, the gyroscopic reactions and the centrifugal forces generated by the right-left orientations of the front wheel are increasingly important, even more so since they are proportional to the speed squared. This explains an easily observed fact: WITHOUT hands on the handlebar, the higher the speed, the more stable the 2-Wheeler gets.
 E) Around 40-50Km/h on a bicycle or100Km/h on a motorcycle, the gyroscopic reactions are quite strong. If the torso leans progressively to the right around axis (8), the chassis and front wheel are pushed by action-reaction to lean left or around axis (5). WITHOUT hands on the handlebar, the gyroscopic reactions thus orient the front wheel towards the left or axis (6).
E) Around 40-50Km/h on a bicycle or100Km/h on a motorcycle, the gyroscopic reactions are quite strong. If the torso leans progressively to the right around axis (8), the chassis and front wheel are pushed by action-reaction to lean left or around axis (5). WITHOUT hands on the handlebar, the gyroscopic reactions thus orient the front wheel towards the left or axis (6).
A centrifugal force is thus generated towards the right and it adds up to the gyroscopic counter-reaction generated by leaning around axis (5). Thus, both maintain the 2-Wheeler vertical while the torso keeps on leaning right around axis (8).
 The rider’s torso may stop leaning at angle (9) to the right and the 2-Wheeler may stay about vertical. Then, the torso weight to the right generates a torque that acts on the 2-Wheeler and the front wheel around (10), which is the opposite of axis (1) of the gyroscope image. WITHOUT hands on the handlebar, the gyroscopic reactions thus also orient the front wheel towards the opposite of axis (2) of the gyroscope image, or around axis (11) here. Thus, adding to the gyroscopic counter-reactions around axis (10), a strong centrifugal force is then progressively generated towards the left to maintain the 2-Wheeler vertical even though the rider’s torso still leans to the right.
The rider’s torso may stop leaning at angle (9) to the right and the 2-Wheeler may stay about vertical. Then, the torso weight to the right generates a torque that acts on the 2-Wheeler and the front wheel around (10), which is the opposite of axis (1) of the gyroscope image. WITHOUT hands on the handlebar, the gyroscopic reactions thus also orient the front wheel towards the opposite of axis (2) of the gyroscope image, or around axis (11) here. Thus, adding to the gyroscopic counter-reactions around axis (10), a strong centrifugal force is then progressively generated towards the left to maintain the 2-Wheeler vertical even though the rider’s torso still leans to the right.
Thus, whether the 2-Wheeler is leaning or it stays leaning, the rider has the impression that his vehicle is very stable at such speeds, WITHOUT hands on the handlebar.
Anyone can observe that on a motorcycle at 100 Km/h WITHOUT hands on the handlebar, a rider can easily turn or lean his head and torso very low to the right or left (and even touch the ground with his hand) and the motorcycle only slightly changes direction towards the side the rider leaned. It’s caused mostly by the front wheel gyroscopic reactions.
F) If the hands are put back on the handlebar at such speeds of 40-50Km/h on a bicycle and 100Km/h on a motorcycle, the gyroscopic reactions are still present and continue to stabilize the 2-Wheeler.
When the rider leans to his right and pushes on the right handle of the handlebar while pulling on the left, he thus feels the gyroscopic counter-reactions on the handlebar that does not let itself turn easily. So the rider does have the feeling of pushing-pulling on the handlebar and, consciously or unconsciously, he is ‘countersteering’ the front wheel. So these gyroscopic counter-reactions explain the feeling of pushing-pulling on the handlebar when going into a turn using the known and taught Countersteering technique.
The motorcycle wheels are heavier and turn faster than the bicycle wheels. The gyroscopic counter-reactions on the handlebar are thus much larger on a motorcycle than on a bicycle. This may explain that the Countersteering technique is more present in the motorcycle world than in the bicycle world.
 G) Again when going into a turn using the Countersteering technique, the rider leans to his right around (12) to go right, and he pushes on the right handle along (13) while pulling on the left handle. He thus orients the front wheel left around axis (3) of the gyroscope, or (14) of the 2-Wheeler here. The front wheel and the 2-Wheeler chassis will thus lean towards the right around axis (4) of the gyroscope, or (15) of the 2-Wheeler here, towards where the rider wants to go.
G) Again when going into a turn using the Countersteering technique, the rider leans to his right around (12) to go right, and he pushes on the right handle along (13) while pulling on the left handle. He thus orients the front wheel left around axis (3) of the gyroscope, or (14) of the 2-Wheeler here. The front wheel and the 2-Wheeler chassis will thus lean towards the right around axis (4) of the gyroscope, or (15) of the 2-Wheeler here, towards where the rider wants to go.
Since the front wheel is oriented towards the left around (14), centrifugal forces (16) are generated to lean the 2-Wheeler towards the right or (15). Thus the gyroscopic reactions and the centrifugal forces add up to lean the 2-Wheeler and start it going into the turn according to the Countersteering technique.
 H) After starting to go into the turn according to the Countersteering technique, the rider is leaning towards his right and the chassis of the 2-Wheeler also leans towards his right. The front wheel follows the chassis and it is thus leaning towards the right or axis (17) here, which is the opposite of axis (1) of the gyroscope. Even with hands on the handlebar, the gyroscopic effects also act around the opposite of axis (2) of the gyroscope, or towards the right around axis (18).
H) After starting to go into the turn according to the Countersteering technique, the rider is leaning towards his right and the chassis of the 2-Wheeler also leans towards his right. The front wheel follows the chassis and it is thus leaning towards the right or axis (17) here, which is the opposite of axis (1) of the gyroscope. Even with hands on the handlebar, the gyroscopic effects also act around the opposite of axis (2) of the gyroscope, or towards the right around axis (18).
 Nothing helps predict the final leaning angles of the torso and chassis (While the Torso-Arms-Handlebar theory predicts them). But due to the gyroscopic reactions and the centrifugal forces, the torso and the chassis are both leaned to the right with the front wheel also oriented towards the right (19). This front wheel orientation towards the right generates a centrifugal force towards the left (20) which counteracts the weight (21) of the rider and 2-Wheeler to hold them and go into the right turn along (19).
Nothing helps predict the final leaning angles of the torso and chassis (While the Torso-Arms-Handlebar theory predicts them). But due to the gyroscopic reactions and the centrifugal forces, the torso and the chassis are both leaned to the right with the front wheel also oriented towards the right (19). This front wheel orientation towards the right generates a centrifugal force towards the left (20) which counteracts the weight (21) of the rider and 2-Wheeler to hold them and go into the right turn along (19).
These gyroscopic effects thus play an important role in supporting the Countersteering technique WITH hands on the handlebars.
3.3 Front fork geometry: Fork angle and Trail
Contribution:
Small differences in front fork angle, trail and tire width give distinctive characters to motorcycles quite similar in terms of weight, height, wheelbase… Lots of supporting examples can be found in motorcycle magazines.
Limits:
But these differences in front fork angle, trail and tire width do not explain the major difference in steering ease and precision at all speeds, between the cases WITH and WITHOUT hands on the handlebars.
Better understanding of some front fork geometry effects:
 A) Stability of the front wheel by itself:
A) Stability of the front wheel by itself:
A 2-Wheeler front wheel is often compared to a ‘caster’ such as found under an office chair or the front of a grocery cart. In all of these cases, the fork axis combined with a positive ‘Trail’ lets the wheel-ground contact patch trail behind this fork axis and stay aligned with the 2-Wheeler longitudinal axis.
So the front wheel of a 2-Wheeler is stable, but nothing insures whether the 2-Wheeler itself will be stable or not.
B) Combination of the front fork geometry with the gyroscopic reactions to stabilize the 2-Wheeler:
 In a top view, a 2-Wheeler leaning to its right can be seen as in this figure, where the dark black line represents the contact path of the wheels on the ground.
In a top view, a 2-Wheeler leaning to its right can be seen as in this figure, where the dark black line represents the contact path of the wheels on the ground.
If the tire contact point to the ground (1) does not slip laterally and the 2-Wheeler plus rider weight push down on the front wheel center (2), a lever arm (3) exists to orient the front wheel towards its right (4). This front wheel orientation towards the right brings the 2-Wheeler in a curve to the right, which generates a centrifugal force towards the left that brings the 2-Wheeler back to the vertical. The front fork geometry thus combines with the gyroscopic reactions to stabilize the 2-Wheeler.
This mechanism does not depend on the vehicle speed and can be seen at stand-still: A bicycle (a motorcycle may be too heavy) can be held up by the saddle without touching the handlebar. When leaning the 2-Wheeler right or left, the front wheel is oriented towards the same side. But it becomes obvious when pushing the bicycle over a certain distance at low speed, that the front wheel swings to the right and left and that the bicycle goes a little erratically. On the contrary as speed increases, the gyroscopic reactions increase with the speed squared and thus become much more important to stabilize a 2-Wheeler.
C) Lateral shift of the CG at very low speed while turning the handlebar:
 If a 2-Wheeler is held up at stand-still and the handlebar is suddenly turned towards its left for example, the wheel-ground contact patch axis will keep the same orientation. But the 2-Wheeler chassis axis and center of gravity (CG) will be shifted laterally towards the left due to the front fork geometry. The center of gravity (CG) may thus force the 2-Wheeler to lean to its left or towards the handlebar orientation.
If a 2-Wheeler is held up at stand-still and the handlebar is suddenly turned towards its left for example, the wheel-ground contact patch axis will keep the same orientation. But the 2-Wheeler chassis axis and center of gravity (CG) will be shifted laterally towards the left due to the front fork geometry. The center of gravity (CG) may thus force the 2-Wheeler to lean to its left or towards the handlebar orientation.
This supports the impression that a 2-Wheeler can be steered at slow speed by turning the handlebar towards where we want to go, without considering the countersteering ‘principle’.
But it’s easy to check that it’s not the case. You only have to ride a 2-Wheeler, bicycle or motorcycle, at such slow speed and suddenly turn the handlebar towards where you want to go, for instance to the left. This test has to be done very carefully because the countersteering ‘principle’ will apply and the 2-Wheeler will be thrown by the centrifugal force towards the right.
Sure, the center of gravity (CG) will have been slightly shifted to the left. But the front wheel orientation towards the left and the vehicle speed will be such that the front wheel contact patch to the ground will also have been shifted to the left. So in a fraction of a second, the front wheel contact point will have shifted much more than the center of gravity (CG), which will make the 2-Wheeler fall to the right.
3.4 Countersteering:
Contribution:
– For a 2-Wheeler (bicycle or motorcycle) to be steered to one side, the front wheel must absolutely be steered to the other side or ‘counter steered’.
– In emergency situations, the countersteering technique can help start turning fast.
Limits:
– But how can we explain the major difference in steering ease and precision, between the cases with and without hands on the handlebars. More precisely, the countersteering theory does not explain why at slow speed a rider has a perfect control of his 2-Wheeler without jerky push-pull actions on the handlebar to steer it according to the countersteering technique. At such speeds, steering is easy and smooth as long as at least one hand is put on the handlebar.
– In emergency situations, the countersteering technique can slow down turning to avoid an obstacle, because of the time lost thinking which side, or opposite side, the front wheel should be oriented. Worse, there is a risk of not reacting correctly and orienting the front wheel in the wrong direction. And there is a risk of over-reacting and hitting the handlebar too hard.
Better understanding of the Countersteering ‘principle’ and technique:
A) The countersteering basic physical ‘principle’:
A broom balanced vertically on a finger can only fall right if the finger is moved in the opposite direction, or to the left. It’s exactly the same for 2-Wheelers: The tire-to-ground contact points must go left to have the 2-Wheeler lean right. So the front wheel must be oriented towards the left or ‘counter steered’ so the 2-Wheeler can lean right and initiate a turn in that direction.
The front wheel orientation in the opposite direction can be verified by simply going through a water puddle at slow speed and then start turning. Examination of the tire trails then shows the front wheel had to go in the opposite direction to start turning in the intended direction.
Knowledge of countersteering has been around for many years, as witnessed by Wilbur Wright’s citation dating early 1900’s and reported on page 131 of: « The Motorcycle Safety Foundation’s Guide to MOTORCYCLING EXCELLENCE ».
Countersteering is required to steer not only bicycles and motorcycles, but all single track vehicles such as 2-Skates, 2-Skis, 2-Floats, 2-Hydrofoils…, or 1-Ski-1-Track like the HAWK snowmobile-motorcycle from AD Boivin Inc.
B) The countersteering ‘technique’:
Based on the countersteering ‘principle’, this steering technique is the main steering technique taught in motorcycle riding courses.
Its teaching can be summarized as follows:
– Below 30-40 Km/h, the technique is not used because there’s a risk of suddenly falling. Some even pretend that the handlebar must be oriented towards where we want to go like in a car. This is false, it directly contradicts the basic countersteering ‘principle’ itself.
– Above 30-40 Km/h, the technique consists in pushing on the handlebar side where we want to go, in order to initiate a ‘countersteering’ that can push the 2-Wheeler to lean on the same side to start turning in the intended direction.
Note that the 30-40 Km/h range is a ‘gray zone’. It varies from one instructor to another. Some rather put it at 25 Km/h and what it depends on seems unclear.
C) The Countersteering ‘Technique’ is a marriage of the countersteering ‘Principle’ with the gyroscopic reactions and the front fork geometry:
At first sight and without having given it much though, the countersteering technique is surprising for a non-initiated. Nonetheless, many motorcyclists learn by themselves through thinking and/or reflex to apply it at speeds in the order of 100 Km/h. It’s understandable since at such speeds, a slight push on one side of the handlebar, like to the right, makes the motorcycle start leaning and going in that direction.
In such a case, the front wheel generates counter-reactions that hold back the rider from pushing too hard on the handlebar and give him a feeling that there is some resistance and stability.
 But at the same time, these gyroscopic counter-reactions are such that the handlebar orientation towards (3) generates a leaning torque of the front wheel towards (4). Also, the handlebar orientation towards (3) is such that the ground contact patch of the front wheel is oriented towards (5). So a centrifugal force leans the 2-Wheeler towards (4). It can also be reasoned that the tire contact points on the ground run away towards (5), so that the 2-Wheeler leans towards (4).
But at the same time, these gyroscopic counter-reactions are such that the handlebar orientation towards (3) generates a leaning torque of the front wheel towards (4). Also, the handlebar orientation towards (3) is such that the ground contact patch of the front wheel is oriented towards (5). So a centrifugal force leans the 2-Wheeler towards (4). It can also be reasoned that the tire contact points on the ground run away towards (5), so that the 2-Wheeler leans towards (4).
Thus around 100 Km/h, the countersteering technique explains that the gyroscopic reactions combine with the centrifugal forces to start turning.
Once turning has started, the rider stops pushing on the handlebar. Once again with the help of the gyroscopic reactions and the front fork geometry that both stabilize it, the 2-Wheeler remains stable in the curve engaged in. When time comes to bring the 2-Wheeler back up, the rider pushes on the handlebar in the opposite direction to bring it back to the vertical.
Around 100 Km/h, the countersteering technique thus explains how a 2-Wheeler starts going into a turn. But it’s the gyroscopic reactions and the front fork geometry that explain the stability in the curve once turning has started.
D) Different interpretations of the countersteering technique:
The 30-40 Km/h range is a variable ‘gray zone’. Moreover and since many motorcyclists learn it by themselves, by reflex and without any motorcycle steering courses, they do not necessarily learn it the same way. Many rather learn to pull on the side of the handlebar, opposite from where they want to go. It obviously gives about the same result and it’s possible that they unknowingly also push on the side where they want to go.
The situation is also different on a bicycle where speeds and wheel masses are clearly less than with most motorcycles. The gyroscopic reactions that depend on both of these factors are also clearly less. Thus on a bicycle, these gyroscopic reactions participate less in holding back the rider’s push-pull actions and insuring stability of the bicycle. This may explain that the countersteering technique is less self-discovered, less known, less taught, less appreciated and less applied in the bicycle world then it is in the motorcycle world.
E) The countersteering technique does not explain clearly and completely the steering of a 2-Wheeler:
Around 100 Km/h, the countersteering technique suggests pushing-pulling on the handlebars on the side we want to go. But under 30-40 Km/h and although the basic countersteering ‘principle’ stays irrefutable, we do not exert jerky push-pull actions on the handlebar of 2-Wheelers accordingly to the countersteering technique, whether they be bicycles or motorcycles. Steering is easy and smooth as long as at least one hand is put on the handlebar. Some instructors even teach that at such low speeds, countersteering should not be applied because jerky handlebar actions can be fast enough to throw the 2-Wheeler on the ground.
Thus, the countersteering technique does not explain clearly and completely how a 2-Wheeler holds up and steers so well at such low speeds below 30-40 Km/h, as long as at least one hand is put on the handlebar.
F) The countersteering technique is confusing:
Obviously, the countersteering technique is confusing because:
– It’s not the same thing that is taught below and above a certain speed, with a gray zone in between the two.
– Some learn to push on one side while others learn to pull on the other side of the handlebar.
– In conformity with the basic countersteering ‘principle’, we must in all cases orient the handlebar in the wrong direction in order to initiate a turn.
– And once having started to turn, the handlebar must absolutely at a certain time be oriented in the right direction to go in that direction, without us knowing at what time or why it happens, especially at slow speeds.
G) The countersteering technique can be dangerous:
In emergency situations where an object has to be avoided, a rider may be surprised. Because of the right-left inversion of the countersteering, he may then lose time thinking about the right way to act on the handlebar to go in the right direction. This time delay can be dramatic. Even worse, the rider under stress may orient the handlebar in the wrong direction towards where he wants to go, as he does in a car, with potentially fatal consequences.
Still more, the unknown and uncertainties linked to the conflicting nature of the countersteering technique may increase the fears leading to freezing against the imminence of a collision. The reaction time may then be further increased.
Still more, the countersteering technique suggests pushing on the handlebar and then letting the 2-Wheeler go into the curve. This technique thus promotes a state of mind of observation of the 2-Wheeler and its reactions. If the rider freezes in front of a danger and forgets the teachings of the countersteering technique, this state of observation and the urgency to act may drive him to orient the handlebar towards where he wants to go as he does in a car. Since he is then particularly alert as he is stressed and observant, he may then stop turning the handlebar when seeing its negative effects. The even greater imminence of an accident may drive him to attempt his maneuver again without any more success. The rider is then trapped and he cannot do anything to avoid the accident.
The rider could then be considered to have done ‘Target Fixation’, like someone walking on the edge of a high building rooftop: Being frightened, he could stumble and fall. The truth is he will have been trapped by the countersteering technique that will have disoriented him and placed him in an observation state of mind, so that he will have been prevented from acting correctly to get out of the tight situation. So it’s as though he was on the edge of a high building rooftop, but rather walking on a slide sloping downwards.
H) The countersteering technique is fast but imprecise:
In emergency situations like on a highway when an object has fallen from a vehicle in front of a motorcycle, the countersteering technique can be applied real fast to avoid the object. A slight push-pull of the wrists can get the motorcycle out of trouble. The countersteering technique can therefore be faster than the simple application of the Torso-Arms-Handlebar theory.
But this swiftness is exactly the reason why the countersteering technique should be avoided at speeds below 30-40 Km/h, when the motorcycle can fall too fast to the ground. This swiftness also has another disadvantage above 30-40 Km/h: The sudden push-pull on the handlebar insures turning fast to avoid the obstacle, but nothing guaranties the motorcycle will go in the right direction and will turn enough without overshooting. On the road, it’s often vital not to overreact in order to avoid hitting oncoming traffic. The motorcycle only has to avoid the object and get oriented correctly in a side lane.
The countersteering technique’s swiftness also does not guarantee steering precision when going fast in a narrow curve with concrete walls on each side, such as in a highway exit.
I) The countersteering technique has proved useful but can be perfected:
The countersteering technique certainly does not only have weaknesses.
It has the merit of being applicable in a large number of cases above 30-40 Km/h and of being taught and transmitted to a large number of motorcyclists. It can thus participate in reducing the chances that they inadvertently orient the handlebar in the wrong direction like in a car. Also, it can be combined with the Torso-Arms-Handlebar theory to accelerate it in emergency situations.
It can simply be considered that the countersteering technique is not perfect and that the countersteering technique can be improved by the Torso-Arms-Handlebar theory, as exposed in the other section of this site: 4.0 Recommendation to increase driving precision and safety
3.5 Weight on the foot pegs and tightening up the knees:
This technique applies to off-road motorcyclists that stand-up on their foot pegs, but also to mountain bikers that do the same on their pedals. See also section 3.12 Straighten or lean the chassis in curves to go faster below, for more on mountain bikers applying force on their outside-of-curve pedal.
Contribution:
– Standing up on the foot pegs of off-road motorcycles or the pedals of mountain bicycles improves steering.
Limits:
– But this riding posture does not explain by itself the improvement in steering of 2-Wheelers.
– Tightening up the knees against the fuel tank is impossible on a bicycle that only has a small tube between the knees, but can be steered as easily as a motorcycle.
Better understanding:
A) Does increased CG height explain the steering improvement gained when standing up on the foot pegs?
The steering improvement gained at low speeds when standing up on the foot pegs could be linked to the center of gravity (CG) elevation of the 2-Wheeler/rider assembly. But even if an off-road motorcycle is lighter than a touring motorcycle, it can still be about 10 times heavier than a mountain bike (that can weigh less than 15Kg – 30Lb). The CG elevation of the assembly is thus clearly higher for a mountain bike than for an off-road motorcycle, so that the motorcycle should clearly benefit less steering improvement when riding on the foot pegs. But it’s not the case, both benefit about the same from riding up on the foot pegs (or pedals).
When riding up on the foot pegs and for the same lateral shift of the torso relative to the 2-Wheeler’s chassis, a mountain bike chassis shifts laterally by action-reaction clearly more than an off-road motorcycle chassis versus the vertical. This should result in a quite different steering ability between the mountain bike and the off-road motorcycle, but it’s again not the case.
So increased CG height hardly explains the steering improvement gained when standing up on the foot pegs or pedals.
B) Effect of standing up on the foot pegs according to the Torso-Arms-Handlebar theory:
According to this theory, an equal lateral shift of the torso versus the chassis controls the front wheel orientation the same whatever the difference in weight between a mountain bike and an off-road motorcycle. This theory can thus explain getting the same steering improvement when standing up on the foot pegs. According to this theory, steering when standing up simply means that the pivot letting the torso lean right or left is not at the rider’s low back height, but at the foot pegs’ height. If the torso leans to one side around the axis at the foot pegs’ height, the front wheel still is oriented in the opposite direction due to the Torso-Arms-Handlebar mechanism, just like when the rider sits on the saddle.
Steering standing on the foot pegs works so well that it does give the impression that it’s by stepping more or less on these foot pegs that an off-road motorcycle is steered. In reality, stepping on the foot pegs simply lets the torso shift towards the opposite side, which lets the Torso-Arms-Handlebar mechanism work.
Moreover, an off-road motorcycle can be steered when simply sitting on the saddle just as a mountain bike can easily go straight when pedaling vigorously (or ‘like madness’) while swinging sideways from extreme to extreme. So it’s not the simple fact of pushing on the foot pegs that steers and stabilizes a 2-Wheeler.
C) Tightening up the knees against the fuel tank and pressing on the foot pegs as if riding a horse:
Same thing when tightening up the knees against the fuel tank. We may have the impression that it steers the motorcycle, but it’s obvious that a bicycle can be steered just as easily without having a fuel tank to press against.
People that have been riding horses are likely to fall under such an illusion. This is because horses can be driven by pressing with the knees or pressing on the stirrups, which the horse can feel and react to. It’s thus easier to have the impression that 2-Wheelers react the same, but they are not animals and they sure can’t ‘feel’ the rider’s impulses.
D) Advantage of standing up on the foot pegs according to the Torso-Arms-Handlebar theory :
Still according to the Torso-Arms-Handlebar theory, the advantage of standing up on the foot pegs is to increase both the speed and amplitude of the torso leaning right or left and front wheel opposing orientations, in order to control the 2-Wheeler faster and more precisely.
If a rider rides standing on the foot pegs and suddenly has to go right, he may lean his torso towards the right but he can also use his legs and lean his torso further to the right. The result is that the front wheel is further oriented in the opposite direction to steer his vehicle faster according to the Torso-Arms-Handlebar theory. Furthermore, the 2-Wheeler chassis being leaned further (versus the vertical) towards the left, the front wheel is still further oriented in the opposite direction, just like the wheel of a wheelbarrow that orients itself towards where it’s leaning (It’s the only way to ‘steer’ a wheel barrow).
So with the rider standing on the foot pegs, the 2-Wheeler (1) reacts faster and (2) can be stable at an even lower speed than WITH hands on the handlebar while sitting on the 2-Wheeler saddle. In servomechanism terms, the action and its result are well known as an increase of the ‘Open-loop transfer function gain’.
3.6 Lateral shift-out of the body at slow speeds:
Contribution:
– At slow speeds on a motorcycle in a parking lot or on a bicycle when turning around in a narrow path, the body lateral shift towards the exterior of the curve helps turn more tightly and safely.
Limits:
– The body lateral shift does not explain how a 2-Wheeler is steered. It’s simply a technique that help steer 2-Wheelers steer at slow speeds.
– Furthermore, the body lateral shift is not done on the same side at low and high speeds on motorcycles (see below section 3.12 Straighten or lean the chassis in curves to go faster), which calls for explanations.
Better understanding of slow speed lateral body shifting, towards the exterior of the curve:
On a motorcycle at slow speed such as about 20Km/h in a parking lot or on a bicycle when turning around in a narrow path, the body lateral shift towards the exterior of the curve helps the arms turn the handlebar more, without letting go of the grips. It also helps leaning the 2-Wheeler more, which further increases orientations of the front wheel, through the ‘wheelbarrow’ effect, in order to turn more tightly.
The ‘wheelbarrow’ effect occurs when leaning it towards where we want to go: It’s not the lateral CG shift towards the center of the curve that causes turning since there is no ‘steering’ difference between loaded and unloaded wheelbarrows. Leaning the wheelbarrow along an axis going from the hands to the wheel-ground contact point, simply lets the front wheel be oriented towards the interior of the curve to insure turning.
The lateral body shift towards the exterior of the curve below 20 Km/h is thus useful, but it does not explain the 2-Wheeler stability at such speed. We still have an unstable vehicle on only two wheels. Besides, the body can stay shifted to one side at such low speed and we can let go of the handlebar. If the speed is lower than the minimum stable speed WITHOUT hands on the handlebar, the body lateral shift will certainly not hold up the 2-Wheeler. It’s the simple fact of putting the hands on the handlebar that keeps it up and stable, seemingly by magic but understandably by the Torso-Arms-Handlebar mechanism.
3.7 Knee extended out sideways towards the direction where to go:
Contribution:
– Many road bicyclists stick a knee out sideways towards where they want to go. This may help keep the bicycle more vertical, thus keeping the tire’s tread flatter on the ground, for better traction on dry or wet pavement.
– On a motorcycle at high speeds (above 160 Km/h – 100 MPH), the knee extended out sideways towards the interior of the curve catches in the wind and exerts a drag that can alone steer a motorcycle in a long curve.
– Furthermore on a motorcycle, hooking a leg onto the gas tank (as explained below in section 3.12 Straighten or lean the chassis in curves to go faster), while sticking a knee out to better feel the distance to ground, is a proven technique to go faster in curves.
Limits:
– On a bicycle at very slow speeds, sticking a knee out sideways doesn’t keep the bicycle up and stable and doesn’t explain the huge stability difference brought by putting the hands on the handlebar.
– On a motorcycle, the rider’s knee weighs little compared to the engine-chassis-suspension and has little effect on balance. The knee may catch in the wind, but pushing-pulling on the handlebar is a much more effective way to exert force against the front wheel gyroscopic reactions, and control where the rider wants to go. See above section 3.4 Countersteering explaining that the countersteering technique is not perfect and can be improved by the contributions of the Torso-Arms-Handlebar theory.
3.8 Target fixation:
Contribution:
– Eye vision is fundamental for both bicycles and motorcycles, to be steered along the desired line of travel at the right speed.
Limits:
– But ‘Target Fixation’ of the eyes seems more like a psychological concept. Nothing explains mechanically how 2-Wheelers are steered towards where we look at, while we only have to turn the steering wheel to change the orientation of a car.
– This concept can help motorcyclists be aware of and avoid staring at targets they must avoid, in order to help them avoid going straight at them against their will. But the lack of correct understanding of the target fixation phenomenon supports riders’ feeling that it’s just a psychological trick that does not threaten them.
Better understanding of Target fixation:
A) Psychological aspect of Target Fixation:
If someone stands along the side of a high building rooftop, he risks being frightened, looking below, stumbling and then falling down. Same thing if there’s a hole in the pavement, a rider risks staring at it and falling into it. A rider could also be surprised by an obstacle to avoid on the road. He could stare at the dangerous obstacle and freeze . He would then be experiencing Target Fixation and chances are he’d go right into this obstacle.
Such simple examples do not really explain how mechanically the 2-Wheeler goes right where we look at. Moreover and at any speed, a rider can look right, left, up or down and the 2-Wheeler simply keeps on going straight. But it’s impossible to avoid changing direction if we lean our back sideways and forwardly while pushing on the same side of the handlebar, as though we were throwing our torso and body in the direction we’re looking at. The Torso-Arms-Handlebar theory explains the essential role of the eye vision that acts with the torso movements, the arms and the handlebar to steer a bicycle or motorcycle. This theory thus incorporates and supports the importance of rider vision.
B) Target Fixation is a dangerous trap for both cyclists and motorcyclists:
With such simple psychological examples like standing along a rooftop, any motorcyclist who doesn’t fear riding may well consider Target Fixation of a dangerous target as not being a problem for him. He then risks getting into real trouble since the situation is worse then it looks because of the very nature of 2-Wheelers.
A rider could be surprised and could freeze staring at the imminence of a collision. If he forgot or he’s not fully confident with the countersteering technique because of its conflicting nature, he may try to orient the handlebar towards where he wants to go, as he does in a car. The negative result could rapidly force him to stop turning the handlebar. The even greater imminence of the collision could make him try his maneuver again without any more success. He would then go straight towards the obstacle. The rider could then be considered to have experienced ‘Target Fixation’. But the truth is that he has in fact been trapped by the basic countersteering ‘principle’ that he does not control adequately and stopped him from getting out of trouble. So when motorcycling, it’s as though someone was frozen on the edge of a high building rooftop, but walking on a slide sloping downwards.
A motorcycle rider could also be going at high speed in a curve, towards the right for instance. He could see that he is going so fast that even if his 2-Wheeler is leaned extremely, he is still getting closer to the center line on the road. Being frightened, he may concentrate even more on this center line and his extreme lean angle. His brain may then become like an overloaded computer not being able to treat all information in real time. The rider may then stop acting on the handlebar so that the intrinsic stability of the motorcycle (with its front fork geometry and front wheel acting as a gyroscope) will keep it on course, which will be fatal if the curve goes on tightening. The rider may even forget about braking to tighten his course. So how could he think of pushing-pulling on the right side of the handlebar. He must obviously develop good automatic reactions, but which ones and how?
This example may seem far fetched. You could think that it only happens to fouls going too fast… You may be right, but I can witness that it can happen to many persons: During the Raid des 21 mountain bike sport event of August 2004, I reached 82 Km/h (even though I had big deep tread tires) going down towards St-Urbain, close to Baie St-Paul, Québec. Sadly, another competitor was leaning in the ditch on the left side of the second-last curve going right, entering St-Urbain, because he was unable to make it through the curve. Although I had a good physical, technical and mental preparation, I found myself nearly on the center line in that curve, instead of my right side. Afterwards, I realized that I was trying to see how that competitor was in that left ditch, that I was watching my bicycle leaning angle to avoid having a pedal touching the ground, that I felt too close to that center line, that a car could suddenly appear coming in the opposite direction, that I was going very fast… To make it short, I never though of using my brakes to make sure I could turn. It’s not that I wanted to keep my rank in the race, it’s simply because my brain had too much information to treat. Conclusion: It doesn’t only happen to others and we have to develop good automatic survival reactions both on bicycles and motorcycles.
How to counteract Target fixation:
A) The countersteering technique to counteract Target Fixation:
When riding above 30-40 Km/h, front wheel gyroscopic reactions become so strong that pushing-pulling on the handlebar must be done vigorously to control a motorcycle. The countersteering technique is thus useful since it tells how to push-pull on the handlebar in order to steer.
But this technique may slow down obstacle avoidance because of the time lost thinking about which side to orient the handlebar. Even worse, we may react incorrectly and orient the front wheel in the wrong direction. And if it’s oriented in the right direction, pushing can be fast, but there’s a danger of pushing too hard and lacking the precision needed to change lane and go in-between other vehicles.
B) The torso-Arms-Handlebar technique to counteract Target Fixation:
In order to counteract Target Fixation, a good method would have to be based on a rider’s most natural and fastest reactions.
If we’re going to hit an obstacle, a natural reaction may be to freeze when frightened, without being able to further react. A first element of solution to this problem obviously is to avoid being afraid, in order to avoid freezing. It’s thus necessary to learn a steering technique that reassures us, a technique that’s natural in order to fall back to it and apply it easily, and a technique that’s also fast and precise. The Torso-Arms-Handlebar technique answers this need.
This technique is reassuring in that it explains simply and clearly a whole lot of questions concerning 2-Wheeler steering, to the point that one wonders why the answers had eluded us so long.
If we’re going to hit an obstacle and we’re not frozen by the danger, a natural reaction is to avoid this obstacle with our eyes, our head and our body. The Torso-Arms-Handlebar theory precisely recommends using such a natural reaction to avoid an obstacle. It recommends looking towards where we want to go and then project our torso, eyes, head and body in that direction, by leaning sideways and towards that direction while pushing on the handlebar on the same side. Thus it involves a natural and automatic reaction.
The Torso-Arms-Handlebar theory clearly explains, mechanically, how a 2-Wheeler will follow the rider’s torso leaning, fast and precisely. The rider then only has to ‘throw’ his torso towards where he wants to go in order to avoid an obstacle and go in between other vehicles or into another lane on the road. The 2-Wheeler then follows the rider’s movements with speed and precision.
In order to make the obstacle avoidance maneuver even more reassuring and automatic, the Torso-Arms-Handlebar theory recommends often practicing an easy slalom drill on the road. This drill happens to have the additional peculiar advantage of being pleasant because it touches one of motorcyclists’ feelings. It gives them the highly sought freedom sensation of riding a machine that obeys them perfectly. You simply ‘think’ of going in one direction to have your eyes go in that direction, have your body flex in that direction, have your torso act on your arms and the handlebar, have the front wheel re-oriented automatically and have the motorcycle follow you…
The Torso-Arms-Handlebar theory is nothing extraordinary, but it can improve the Countersteering technique, it can explain how Target Fixation works mechanically and it can help counteract Target Fixation of a dangerous target.
3.9: “Follow your line” on a mountain bike trail:
Contribution:
Countersteering is largely known in the motorcycling world. And it’s just about totally unknown in the cycling world.
But the saying “Follow your line” is equally largely known and recommended in the mountain bike cycling world.
When mountain biking, you must (1) look forward, (2) visualize a path and (3) throw your body in the direction of your line. Hence pick, choose, follow. . . your line.
The Torso-Arms-Handlebar Theory clearly and scientifically supports this saying. This theory explains that looking ahead, visualizing a path and throwing you torso in that direction, will make the 2-Wheeler follow the torso in the right direction, essentially because of the rider, bicycle and Torso-Arms-Handlebar mechanism constituting a non-obvious ‘follower’ steering servomechanism, where the bicycle follows the rider.
Limits:
– NONE. This steering theory invites all cyclists to do what’s recommended by the Torso-Arms-Handlebar Theory in section 4.0 Recommendation to increase driving precision and safety.
The only addition to it would be:
(1) To encourage practicing the recommended ‘Slalom Drill‘ of this recommendation section, for its advantages.
(2) And to indicate that this mountain bike proverb, has a solid scientific explanation.
3.10 Camber steer of the tires:
Contribution:
– If a wheel is going straight ahead and it’s at the same time leaning to the right, for instance, it will tend to steer towards the right because of the sidewall construction. This effect is more evident at high speeds so that Camber steer can by itself alone explain the stability of motorcycles at such speeds, WITHOUT hands on the handlebar.
– When riding at slow speed in a parking lot, the lateral body shift towards the exterior of the curve permits leaning the 2-Wheeler more. This lets the front wheel act like a wheelbarrow leaning around an axis going from the handles to the wheel-ground contact point. And this permits the front wheel to be oriented further towards the interior of the curve to turn tighter.
Limits:
– Neither of these two phenomena explains the major difference in steering ease and precision, between the cases WITH and WITHOUT hands on the handlebars.
3.11 Accelerate to straighten up the motorcycle:
Contribution:
– It certainly applies when the throttle of a motorcycle is twisted to accelerate in a tight turn. This increases the centrifugal force that straightens-up the motorcycle.
Limits:
– But this phenomenon does not explain at all the major difference in steering ease and precision, between the cases WITH and WITHOUT hands on the handlebars.
– Also, a bicycle is as stable and can be steered just as well as a motorcycle without any engine and throttle.
3.12 Straighten or lean the chassis in curves to go faster:
This is a very special case where motorcyclists and mountain cyclists do things very differently, but where the Torso-Arms-Handlebar theory can shed light:
A) Natural and automatic lean angles in curves:
Section 1.3 Three steps when going into a turn and section 2.4 Prediction of the lean angles in a steady state curve of this site show images and explain that naturally and automatically, the chassis (orange line here below) of the 2-Wheeler in curves leans more than the rider’s torso (yellow line here below).
Note that the right and left images below are the same as the ones in section 2.4 Prediction of… But the colors were changed and the image on the left was inverted left-right.

B) But race motorcyclists and race mountain-bike cyclists want to go the fastest they can in curves:
Race motorcyclists want their 2-Wheeler chassis to be straighter-up than natural and automatic, because it’s well established that a tire should be closer to perpendicular of pavement, so that the tire’s tread is flat on the ground for better traction and elimination of rain water.
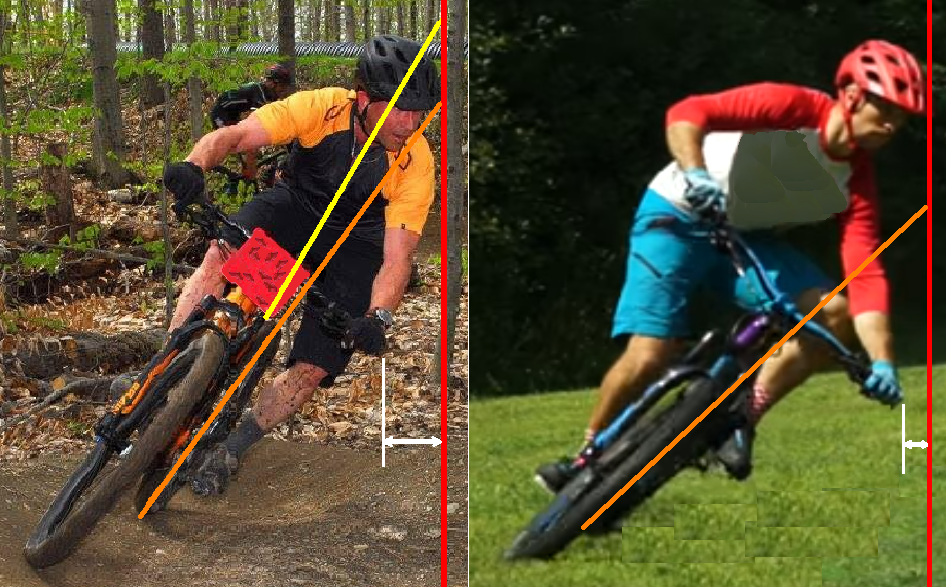
And as seen on the image above-right, mountain-bike racers want to turn as close to trees as possible, for a shorter distance-to-go and travel-time. They try to get that (a) with the rider standing more vertical to avoid his head touching the tree, and (b) with the bicycle and legs leaning further down to lower-down their Center of Gravity (more explanations below).
So instead of the natural and automatic leaning of the motorcycle and bicycle as on the left images below, race motorcyclists and mountain bike racers want something:
– different from what’s natural and automatic (as on top and bottom left images below),
– and different from one another (as on the right images below): vertical chassis for motorcyclists (top-right image) and flatter-leaned chassis for cyclists (bottom-right image):
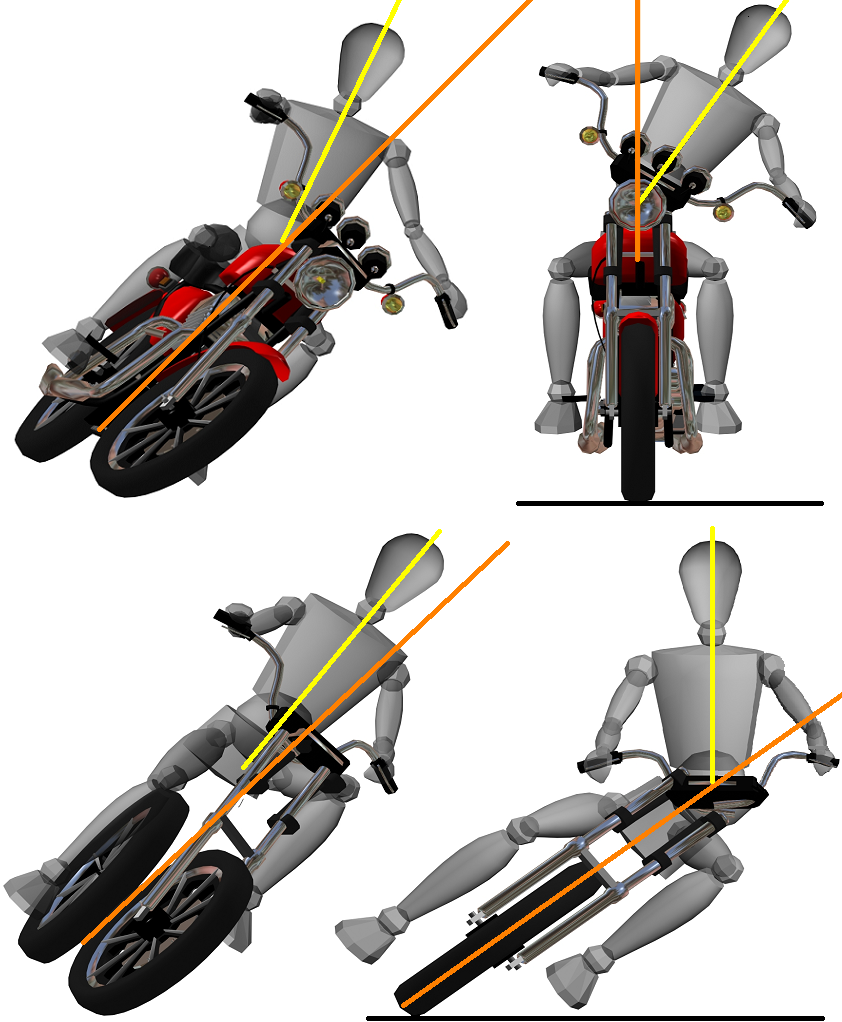
Race motorcyclists do not obtain vertical tires to horizontal ground, but they lean them less by hooking their leg on the gas tank and deporting their body sideways towards the inside of the curve, which also lets them stick their inner-of-curve knee out and feel how close they are to the ground, in order to avoid leaning too far and avoid sliding out ot the curve:
Mountain bike racers don’t keep their torso vertical, but they (1) deport their body sideways towards the outside of the curve and thus put their weight on the outside pedal (see also above section 3.5 Weight on the foot pegs and tightening up the knees), while (2) they flex the outside-of-curve elbow, and extend the inside-of-curve arm. Thus, the handlebar and bicycle can get closer to the trees inside the curve, represented by the rider’s hand closer to the red vertical line below-right:
C) But how can you act against natural and automatic reactions, in order to apply these techniques to go faster in curves?
The Torso-Arms-Handlebar theory and recommandations for steering can still help:
Both when riding a motorcycle and a mountain bike, when you’re a beginner or at the beginning of a new season, it’s good to decompose the movement:
… (1) Right at the start while still going straight ahead:
– On a race motorcycle, deport your body towards the inside of the coming curve, while hooking your leg on the tank.
– On a mountain bike, deport your body towards the outside of the coming curve, while applying more weight on the lowered outside pedal, and while extending the arm inside this curve and flexing the elbow outside the curve.
… (2) Next in both cases:
Immediately lean right-left rapidly a few times, in order to feel the 2-Wheeler going in your intended direction, as suggested in section 4.0 Recommendation to increase driving precision and safety of this site.
… (3) And next while still keeping your leg hooked or your elbow flexed with other arm straight, and according to the teachings of the Torso-Arms-Handlebar theory: Follow your line around the curve looking far ahead to lean your torso more or less and automatically act on the handlebar through the Torso-Arms-Handlebar mechanism:
– On a race motorcycle, expect to have to push-pull forcefully on the handlebar, due to the strong gyroscopic reactions of the fast turning front wheel, not letting your Torso-Arms-handlebar mechanism act easily on the handlebar.
– On a mountain bike, expect to have to continually update your line from side to side all along the racing trail that goes somewhat erratically along trees, rocks and other obstacles.
As you get better, you can progressively go more fluidly from straight ahead into the curves. And you can optimize the turning radius in order to do the curve faster… and win the race.
D) Very special case:
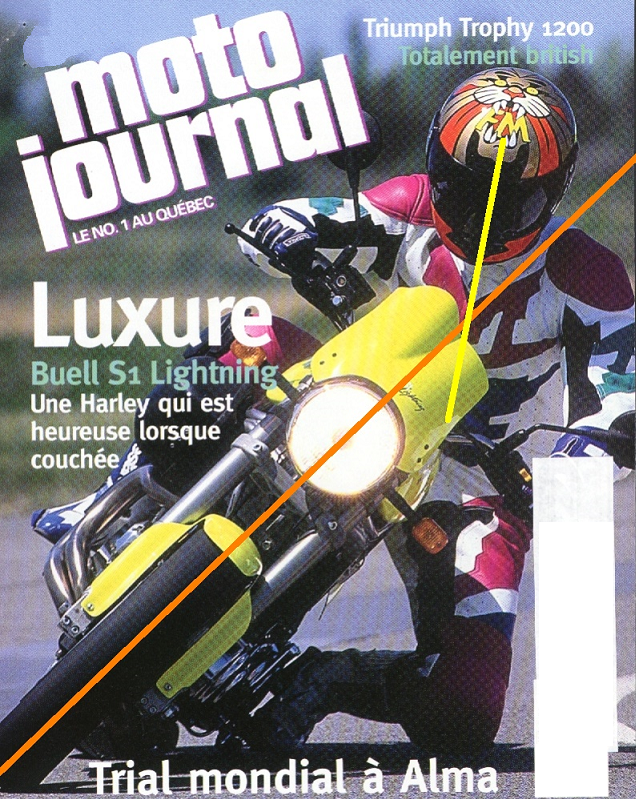
When a yellow torso-head line is added to the above-right picture as below-right, we can exceptionnaly see that the rider’s torso may be leaning more than the 2-Wheeler chassis. This is due to the rider sticking his pelvis as far away from it’s seat as he can. And still then, the yellow torso-head line leans only a little bit more than the orange chassis-line. The other photo below-left shows the same technique but with the pelvis less far from the seat and the yellow torso-head line leaning less than the orange chassis-line, as is usual, natural and automatic.

E) Strategies to go faster in curves during a mountain bike race:
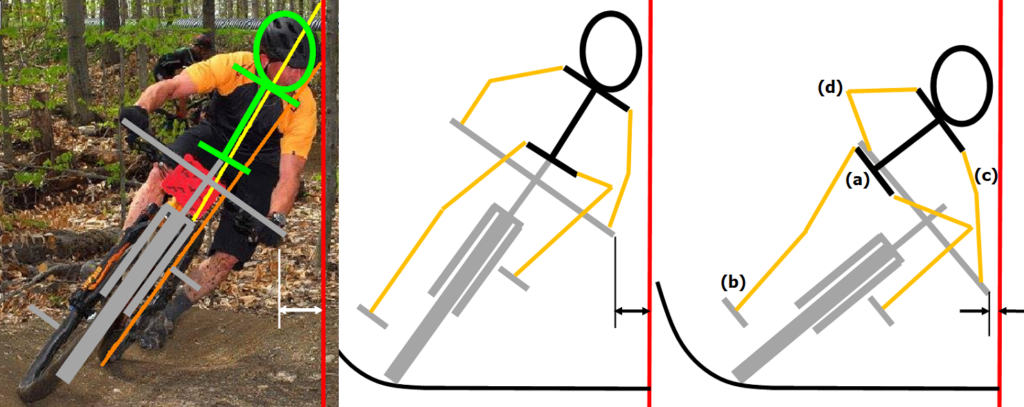
Schematic lines can help make things clearer: Lines were superimposed on the image below-left, to show that they represent reality when copied to the middle image. And both images show the chassis leaning more than the rider, which is natural and automatic. But the same chassis-torso-head added on the next right image, were leaned and moved to represent (a) the body deported towards the outside of the curve, (b) with weight on the lowered outside pedal, (c) with the inside-curve extended arm, and (d) with the outside-curve flexed elbow.
One could think that the agressive studs on each side of the tires will be useful to get a better grip on the gravel and go faster. But the leaned tires will plow in this gravel and will not sustain high lateral forces. So although the Center of Gravity may be lowered slightly, the speed in the curve will not be much higher to reduce travel time.
But other things can make a big difference:
– The first is that since the pelvis of the rider is moved sideways outside the curve, this rider is in essence using the same technique as in the above section 3.6 Lateral shift-out of the body at slow speeds. So he’s in a better position on the bike to see farther into the curve and engage himself into it, while controlling better his torso leaning right-left, similarly to the race motorcyclist in a curve controlling his torso leaning by feeling the ground with his interior-of-curve knee.
– A second is that from the beginning to the end of the curve, he can go around a faster line around the curve:
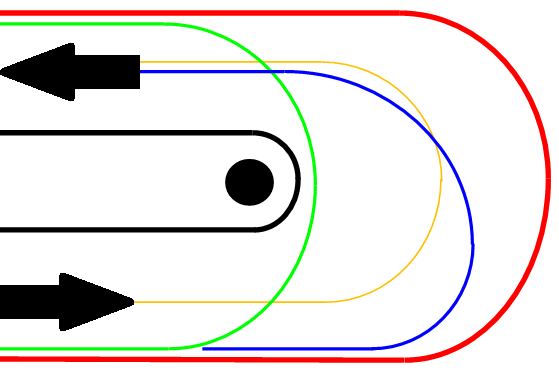
The image below shows a mountrain bike trail with a black dot representing a tree, the black line is the interior and the red line is the exterior of the curve. The natural and automatic path for a rider would be along the thin orange line. And the green line is this faster line, permitted by the handlebar and bicycle getting closer to the tree inside the curve, around a longer radius circle in order to reduce lateral acceleration and forces, so the speed can be increased which reduces travel time:
– A third point is that this increased speed coming out of the curve is of utmost importance to avoid time and energy losses: If the rider slowed down in the curve, he is slowed down coming out of it, so he not only keeps on losing time until he regains his speed, but he has to put effort and lose energy accelerating to regain an higher speed.
– A fourth is that if the curve is not on flat terrain, but goes down such as down a mountain, the rider can go along the blue line: He can go fast close to the red line at the beginning of the curve and burm top, and then cut down along the descending slope using the downward slope to reaccelerate coming out of the curve and regain his speed very fast and without effort. He in essence, transforms his potential energy (high at the top beginning of the burm), into kinetic energy down the curve and burm, without effort and energy loss. And his pelvis moved sideways outside the curve at the beginning of the movement, lets him see farther down into the curve to more easily and precisely perform this cut down along this descending slope.
– A fifth is that the rider can go along the more vertical outside-of-curve edge of the berm, along the red line, so that his speed can be increased further without sliding out. So the circular distance travelled can be greater, but the speed can be so high, that travel-time can be further reduced. And he may come out of the curve like a bullet, losing even less time reaccelerating coming out of the curve.
– A sixth point is that when riding a mountain bike with your body and pelvis sideways out of the curve, you’re not sitting on the bicycle. You’re riding up on the pedals, which helps you react faster to any disturbance on the trail or sudden tire sideways slippage. So you can correct faster your body or bicycle leaning.
– And a seventh point is peculiar and related to fat bike on snow: Snow in North-Eastern America is not as dry and fluffy as in the Rockies and the Alps. It’s heavier but it can still be soft. And in areas around Quebec City for instance, no way can you go out just anywhere in snow depths of one meter (3 feet). So fat bike trails must be packed with snowshoes or a narrow snowmobile. Thus, trails are narrow and when you go around a tree, you must avoid at all prices to go out of the trail where you will dig down in a fraction of a second. Which will stop you as fast, and which can easily throw you over the handlebar. Very nice in soft snow, but dangerous against a solid tree. So turning with your pelvis out of the curve (a) lets your handlebar get closer to the tree, (b) keeps the front wheel from going too far out of the curve in the soft snow, to avoid digging-in to a stop, and (c) puts you in a better position as explained above, to see farther into the curve and engage yourself into it.
Still further on strategies to go faster in curves during a mountain bike race:
Since the curve along the vertical edge of burms can be bumpy and since this curve may go very far out of the curve, you must always examine all the distance along an Olympic Cross-Country (XCO) or DH (Down Hill) course, to find and optimize best and shortest-travel-time lines all along this distance, prior to the race, in order to reduce total travel time… and win the race…
And why the difference between mountain bike and race motorcycle strategies?
Burms in trails are created naturally by mountain bikes digging a path in the soft-soil. But burms also are created voluntarily because riders like them and generally want more. So leaning the bicycle almost flat horizontally on the exterior of burms in curves, nearly defines mountain bike riding. There are burms on race motorcycle courses, but not as systematicaly and vertical as on mountain bike trails.
Thus, slower speeds and this leaning-flat are the two elements that make the difference between mountain bikes and race motorcycles, ending-up in the two opposite general strategies of flatter leaned chassis for cyclists and oppositely more vertical chassis for motorcyclists.
3.13 Lean or Steer through a Series of Obstacles – Dilemma:
How to solve the dilemma between:
– Turn the handlebar like a car steering-wheel, in order to avoid close obstacles, such as in a rock garden when mountain biking, or such as on a motorcycle when avoiding potholes covering a road.
– While at the same time let the Torso-Arms-Handlebar mechanism turn the handlebar, by leaning your body to go along the intended line, and control the 2-Wheeler properly.
This situation is similar to the case of an airplane pilot trying to go level while being submitted to upwards-downwards air currents. And this is in general, typical of any servomechanism submitted to disturbances.
In the case of the airplane, the disturbances come from the exterior environment, and the pilot tries to go more or less level.
And in the case of the 2-Wheeler, the disturbances come from the pilot trying to avoid obstacles, while following a general curved line.
In the case of the airplane, the pilots are nowadays helped by control systems optimally reducing the effects of such up-and-down disturbances, for instance using a PID (Proportional-Integral-Differential control system).
But in the case of 2-Wheelers, electronic control systems don’t help pilots. Even worse, turning the handlebar through close obstacles supports the rider having the impression that it’s the way to control his 2-Wheeler along the general curved line. So when his 2-Wheeler must go along a curve to avoid trees (mountain bike) or avoid cars in the other lane (motorcycle), the rider falls into the situations of Target Fixation or the Countersteering’s loss-of-time-thinking-to-steer-in-the-opposite-direction, which often results in an accident. A typical example is this accident where a couple died when going out of a curve: Un couple périt sur la moto de ses rêves dans Chaudière-Appalaches.
The solution: Mix both correctly.
If you go into those potholes or rocks, you will be jumping up and down, and you may be sort of ejected. So on one hand, you do have to turn the handlebar to zig-zag around these obstacles.
But you also want to avoid falling (and lose precious seconds). So you also have to identify a curved line where you think the 2-Wheeler and you will want to be a meter or more ahead. And your body and head must follow this line for the Torso-Arms-handlebar mechanism to stabilize you and avoid falling.
So it’s not that easy, but you essentially have to both look far ahead at the line to follow and throw your head and body in that direction, while still keeping an eye closer to steer around obstacles. So a trick is to both (a) try to throw your body where it will have to be above the tire-ground-contact after going around the obstacles, and (b) steer the handlebar through the obstacles, trying to have the tire-ground-contact somewhere close to under the rider’s center of gravity once having been through the obstacles. In other words, you cannot steer the handlebar through the obstacles too far from under the rider’s center of gravity. One way to do it is to know in advance where the obstacles are, and (a) follow with your head and body an imaginery line that goes through these obstacles, while (b) steering the handlebar around these obstacles. This way, your center of gravity is not too far from above the tire-ground-contact and you have more chances for the Torso-Arms-handlebar mechanism to stabilize you correctly and avoid falling.
I noticed that in the rock garden of the 2019 Coupe-Québec #2, at Le Genévrier, Baie-St-Paul, Québec, my best and fastest results were obtained when:
– I kept on jerking on the handlebar to go around rocks or jump over certain ones, in order to get the best optimised course line, that better avoided mud holes making my tires less slippery.
– While I knew by memory where my mountain bike would have to be in the next one or two seconds, so that I threw my head and body in that direction, which controlled the handlebar through the Torso-Arms-Handlebar mechanism, and kept me up, on the right course.
So my trick was to know by heart and visualize that I had (1) to keep right in the first three meters even if mud trails of other riders went left, (2) then go up on the right for a meter, and up again another meter, (3) then down towards the left but still on the right side to avoid going too low, (4) then go up again, (5) and then down, keeping right which was faster towards ‘freedom’.
It may seem peculiar to remember what happens along such trails, but that’s typical of lots of races if not all, including for instance identifying and remembering small visible cues where to react on super-fast race motorcycles.
3.14 Riding on rollers:
Many cyclists use rollers to train on their own bicycle or warm-up prior to races. But since there is no centrifugal force or centripetal acceleration, how can the bicycle stay upright?

Many Internet sites explain how to do it, basically by holding yourself against a wall at first, by looking ahead and by keeping cool. Just about like on a regular bicycle on the ground. Which is quite normal since one can reason that there is no centrifugal action, but the front tire contact patch on the roller can still go sideways exactly as it does under a 2-Wheeler on the ground.
As explained for a bicycle on the ground and in both sections 1.2 Where stability comes from at slow speeds and 1.3 Three steps when going into a turn, one can reason in terms of centrifugal force or in terms of the front tire ground-contact-point that goes sideways under the vehicle to bring it back up.
So the Torso-Arms-Handlebar theory simply states that looking ahead and avoiding sideways fall, is done the same way as with a bicycle on the ground, through the Torso-Arms-Handlebar mechanism. And this is supported by the fact that in both cases, there exists a minimum stable speed WITH hands on the handlebar, and there exists a higher stable speed WITHOUT hands on the handlebar.
3.15 Steering-Theories Wars and Contributions:
Debates on how 2-Wheelers are steered has often popped-up for years, sometimes raging.
Certain persons act as if they were married with their theory. Like not being able to imagine anything but the Countersteering theory, eventhough nearly nobody knows anything about it in the mountain bike community. Or like not being able to look at the Torso-Arms-Handlebar theory, eventhough it can be thought of as a simple enhancement of the Countersteering theory.
These debates may keep on going. But this Torso-Arms-Handlebar theory has the potential to put together many of these theories, as if parts of a big puzzle. Many goodwill persons have made strong contributions to support some of them theories. And with a slight shift in perspective, these contributions can be used to shed light on the subject and put together many parts of this big puzzle.
Hoping not to insult any such goodwill contributors, the following Web pages can be used in this way, involving these camps:
– Body Leaning: You lean your torso towards where you want to go.
– Handlebar Steering: You turn your handlebar in whatever way, to make you go where you want to.
– Handlebar Steering but NO Body Leaning: The rider’s torso is blocked and does not move, but the rider steers the handlebar to go where he wants.
– Handlebar Steering through the TAH Mechanism: The body leans but it automatically controls steering of the handlebar through the TAH Mechanism.
-A- WITHOUT Hands on the Handlebar – No Steering input … Body weight steering only:
Nearly perfect demonstration: This video from AlexCP67 dates back 2009 and is convincing that Handlebar Steering may be working, but Body Leaning might work very well in many instances. You can follow the video for a while and then be convinced. But…
But if you look carefully at minutes 1:37 to 1:38 (over 1:51 minutes video total time), you can see this image and an enlargement of the rider below:


It then becomes obvious that the rider does keep both arms high up, but he has to go far out, in order to balance-steer the motorcycle into a sharper turn. So body leaning alone does work, but never steers as easily and as fast, as WITH hands on the handlebar, possibly through the TAH Mechanism.
-B- Keith Code’s No B.S. Machine – Absolutely NO Body Steering can work as good as Countersteering:
Clear and simple demonstration: A second handlebar over the regular one, is rigidly fixed to the frame and actuates nothing:

This apparatus demonstrates that if you go along a fast lane and you suddenly try to steer sideways, no way are you going to succeed without the hands on the regular handlebar steering the front wheel. So this clearly supports Handlebar Steering.
But where does the magic come from?
You can actively countersteer by pushing-pulling on the handlebar, but why does it work so nicely most of the time without jiggling-jerking on the handlebar, even at slow speeds where it’s often recommended not to do any countersteering?
-C- Torso Blocked in a Plastic White Cast:
Another strong demonstration: What if the rider cannot lean his body. Will he still be able to steer the 2-Wheeler as well by only pushing-pulling on the handlebar?
A jacket (white part), rigidly fixed to the bicycle holds the rider’s torso still. The rider seems to steer his 2-Wheeler somewhat effortlessly. Then a rope tied to this bicycle is suddenly pulled sideways, which does not seem to bother the rider so much. Then it’s tempting to conclude that steering the handlebar alone, without body leaning, is sufficient and easy. But…
But a close look at minutes 2:20 to 2:22 (of a total video time of 3:07), can reveal something slightly different:
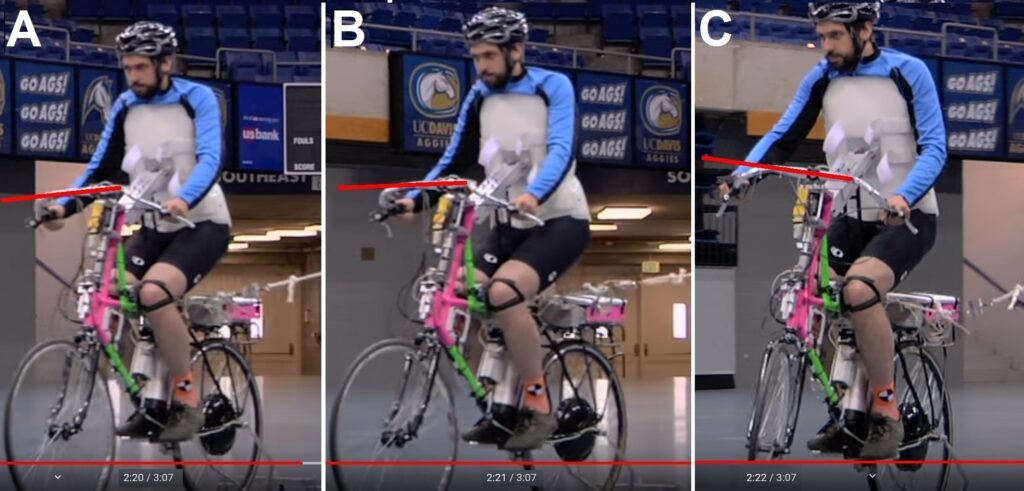
On the image above, we can see in picture A the bicycle going straight. And in picture B, the bicycle and white cast are pulled to the rider’s left, while his head, shoulders and upper torso do not follow the cast because of their inertia. This results in a slight torso movement to the rider’s right inside the cast.
And a fraction of a second later in picture C, the handlebar and front wheel are clearly steered further to his left.
Zooming from pictures A and B gives on this following image below, the additional pictures D and E, better showing that: (1) the red line of the rider’s face leans more to become the orange line, (2) the yellow line of the cast leans more in the opposite direction since it’s pulled by the rope, so this line becomes the green line, and (3) the total white double-arrow angle increases, (4) while the black distance between the rider’s beard and the cast is reduced, clearly showing this slight torso movement to the rider’s right inside the cast:

Thus and although small, there is a body-leaning of the rider. It may not seem much, but in terms of servomechanism error-detector output, it’s there, it’s important and it must not be neglected.
Now the red lines parallel to the handlebar’s transverse top tube in pictures A, B and C, show on picture B a slight clockwise rotation of the red line, corresponding to a slight rotation of the handlebar and front wheel to the rider’s left. And these rotations are synchronized with this slight movement of the torso inside the cast. All these actions are fully compatible with the Torso-Arms-Handlebar – TAH Mechanism, stating that torso leaning to the rider’s right orients the handlebar and front wheel in the opposite direction to the rider’s left, even though his elbows are flexed and possibly somewhat flexible.

Furthermore from pictures A and B, the red line parallel to the handlebar’s transverse top tube, further rotates clockwise in picture C. As seen on the image above and possibly due to the bicycle chassis with front fork axis yellow line being forward of the Center of Gravity in red of the arms and hands, the chassis and axis being suddenly pulled to the rider’s left, will result in these arms and hands not moving because of their inertia, or going right like the rider’s torso, but not limited by the cast (as in picture B). So the arms and hands go farther and this orients further the handlebar and front wheel to the left, as shown in picture C.
Furthermore, the Torso-Arms-Handlebar geometry of this ‘City Bicycle‘ does not link as well the handlebar to the torso, as with a mountain bike, but this detected ‘error’ is enough to initiate a series of events. Which result in turning of the handlebar towards the rider’s left, that can be observed a fraction of a second later, itself resulting in a countersteering effect fighting against the external rope-pull disturbance:
We certainly agree with the authors of the video that understanding better the dynamics of 2-Wheeler steering, will eventually result in better designs of 2-Wheelers. But we submit that it can further result in better teaching of how to steer them and better designs of new motorcycle concepts.
On a more technical point of view:
A small detail strikes the mind: The ‘simple trailer’ at the back, measuring the chassis angle to the ground plane or to the vertical, without any complex and costly gyroscopic mechanism, is a beauty of simplicity.
On the other hand, measuring the torso lean angle to the chassis will pose a challenge: According to the Torso-Arms-Handlebar theory, it may seem to be the side-leaning that is important. But in reality, the lateral shift of the center point between the two shoulder joints, or of the base of the neck, may very well be more significant, along with twisting of the upper body.
So clever means to measure them will also have to be devised. But it’s not all. As exposed in section 1.4.2 Which Torso-Arms-Handlebar geometries work best of this site, these geometries are not created equal. So care will have to be taken to select best handlebar geometries. And fine-tuning may be required as, for example in the case of the City Bicycle on the image above, a smaller-torso-height rider might be prefered to give a different ratio, between torso-leaning and handlebar orientation.
-D- Bicycle steering while slaloming with arms straight:
And still another utterly simple but informative demonstration (by the author himself of this Internet site, Pierre Ethier, then 70 years old, in his CCMSA mountain-bike-club suit, and still having fun mountain biking):
All along this YouTube video WITH added stopping and drawing lines, the rider keeps his arms straight and does not giggle or jerk on the handlebar. He simply lightly leans from one side to the other, consinuously changing side. It’s nearly undectable as can be verified on the same YouTube video WITHOUT stopping.
The only clues are the head changing side and the still images with added lines:
At the beginning, the rider goes on straight and suddenly leans to one side. The video stops, and shows the image on the left below, which clearly shows the head-torso (yellow line) leaning on this side compared to the chassis (orange line), while the straight arms push-pull on the handlebar-and-front-wheel towards the opposite side (red line), without any jiggling or jerking on the handlebar… exactly as per the Torso-Arms-Handlebar theory.
At the end, the video stops again and clearly shows once more the head-torso going in one direction, while the handlebar-and-front-wheel are going in the opposite direction:

This simple and easily repeatable experience does not contradict the previous theories above, and rather puts them together.
A rider has the immediate impression of being stable as soon as he puts his hands on the handlebar, making him think that it is Handlebar-Steering that controls the bike. But it’s not the giggling-jerking of the handlebar that steers it, since there obviouly is none.
The same rider may have the impression that it’s his Body-Leaning that steers his bicycle, but it’s not the weight of the body that steers, since any-size rider will have the same effect. And when you remove your hands from the handlebar, you have to go far out, in order to balance-steer the motorcycle into sharp turns.
The Torso-Arms-Handlebar mechanism puts these two perceptions together: It’s the Body-Leaning that causes Handlebar-Steering through this mechanism.
Last observations on a more technical point of view:
Also obvious from the two images above, is the fact that the body sideways-leaning-angle-to-the-bicycle-chassis is small at this slow speed no more than 20 KPH (12 MPH). Not demonstrated here, but as speed increases, this angle is reduced so much that it’s not easy to observe.
Furthermore and typical of a Follower Servomechanism, the sine-wave input of the rider leaning from side to side, and so going slaloming, results as can be predicted by Control Engineering, in the Output-bicycle-leaning-angle lagging or being late compared to the Input-Rider-leaning-angle.
When looking carefully at the video, the bicycle (Output) movements clearly lag about half a cycle (180 degrees) behind the head-and-eyes (Input) movements. There’s nothing you can do to avoid that or modify this phase lag… as if there exists a hidden servomechanism here, which is precisely according to the Torso-Arms-Handlebar theory.
Even more and still typical of servomechanisms (but not demonstrated on the video), if you try to slalom faster, the result is the bicycle having less time to go on either side, and thus not going as far. Which is typical of a servomechanism’s amplitude response, which decreases as the frequency increases.