The present section analyses the results and summarizes the safety margin calculations made in the two previous sections.
SECTION UNDER CONSTRUCTION.
This section has not yet been completed in English. The reader may consider the old French version that follows here below:
Résumé des calculs de marges de sécurité:
La présente section analyse et résume les résultats de calculs de marge de sécurité contre le renversement dans le cas des 3-Roues à deux roues avant.
Mais ATTENTION : Les calculs et graphiques présentés ci-dessous doivent être considérés comme des approximations qui donnent un aperçu général, mais ne peuvent remplacer une analyse rigoureuse avec les ‘vrais’ paramètres des ‘vrais’ véhicules.
Les 3-Roues subissent des accélérations latérales en tournant à gauche ou à droite. Ils subissent aussi des accélérations longitudinales en freinant ou en accélérant vers l’avant. Lorsque ces accélérations sont trop fortes, ces véhicules peuvent se renverser tout comme les 4-Roues (autos). Donc pour les analyser, on peut tracer un graphique des accélérations latérales et longitudinales, en y indiquant les zones au delà desquelles il y a renversement du véhicule. Tous les graphiques ci-dessous comportent ainsi un axe horizontal représentant les accélérations latérales gauche-droite et un axe vertical représentant les accélérations longitudinales.
A) 3-Roues à deux roues avant motrices-directrices et passagers à califourchon :
Le Coop-2000 présenté aux sections précédentes 3. Configurations possibles et exemples de ce nouveau 3-Roues et 4.3 Stabilité contre le renversement des 3-Roues à deux roues avant motrices-directrices, fait partie de ces 3-Roues.
Coop-2000 avec deux gros passagers du 95ième percentile :
La pire condition d’utilisation est le cas de chargement avec réservoir plein et deux gros passagers mâles américains du 95 ième percentile. Avec ses pneus d’automobile peu performants, on obtient le graphique suivant :

Sur ce graphique, les accélérations gauche-droite de l’axe horizontal sont notées Ay/g où :
– Le A représente le mot Accélération,
– Le y représente l’axe transversal (et le x l’axe longitudinal) dans le cas de la modélisation des véhicules,
– La division par g (qui est l’accélération gravitationnelle) facilite les comparaisons sans se soucier des unités de mesure.
Dans le cas de Valkenburgh-Klein-Szostak, cité aux sections précédentes 4.3 et 4.4, c’étaient les freinages qui étaient étudiés et placés à la verticale au dessus de l’axe horizontal. Dans le cas des 3-Roues à deux roues avant, ce sont les accélérations vers l’avant qui peuvent causer des problèmes. Donc ici, ces accélérations vers l’avant sont encore à la verticale, mais les valeurs positives sont orientées vers le bas.
La courbe en rouge représente la limite maximale de capacité des pneus, si on considère que les trois roues participent à accélérer le véhicule. Puisqu’il s’agit d’un 3-Roues à traction avant, il y a transfert du poids vers l’extérieur de la courbe et vers l’arrière, lors des accélérations latérales et longitudinales. Donc les roues avant sont allégées et ne peuvent pas fournir d’aussi fortes accélérations. Donc c’est plutôt la courbe en trait noir discontinu qui représente la limite maximale de capacité des pneus.
Plus à droite, la zone hachurée en bleu représente la région à éviter au delà de laquelle il y a renversement du véhicule. On constate donc que la limite maximale de capacité des pneus est toujours à gauche de la zone hachurée de renversement. Le 3-Roues ne peut donc pas être renversé sur une route horizontale en conditions normales d’utilisation.
La ligne droite en vert représente le cas de marge minimale de sécurité contre le renversement, qui est ici de 14,24%.
On constate finalement que l’accélération maximale de ce 3-Roues dans cette condition de chargement, est de 0,493g ou 0,493 fois l’accélération gravitationnelle.
Coop-2000 avec deux gros passagers du 95ième percentile et pneus performants :
Évidemment, un 3-Roues plus récent pourrait être équipé de meilleurs pneus plus performants qui augmenteraient le risque de renversement. Mais aujourd’hui, ce 3-Roues Coop-2000, qui date de 1987, serait reconstruit avec des caractéristiques différente dont une position différente du Centre de Gravité de même qu’une Voie-Track (la distance entre les deux roues avant) différente.
Si ce 3-Roues était équipé de tels pneus performants mais que sa Voie-Track était la même que dans le cas du 3-Roues de type T-Rex ou G-Max plus récents, on obtiendrait le graphique suivant où l’on peut constater que la marge minimale de sécurité contre le renversement de 12,65% serait encore acceptable :

Coop-2000 avec un seul passager du 50ième percentile et pneus ordinaires :
Tel qu’il est avec ses pneus ordinaires et un seul passager moyen mâle américain du 50ième percentile, il est possible de constater que l’accélération maximale longitudinale est de 0,555g et que la marge minimale de sécurité contre le renversement de 39,53% est confortable :
B) 3-Roues à deux roues avant mais moteur arrière actionnant la roue arrière et passagers côte-à-côte:
Ces 3-Roues incluent le Scorpion, le T-Rex, le Cyclone et le G-Max décrits aux sections 1.3 Les 3-Roues à une seule roue arrière et 4.4 Stabilité contre le renversement des 3-Roues à moteur arrière et roue arrière motrice. Les paramètres utilisés pour les graphiques ci-dessous s’approchent de ceux d’un 3-Roues de type T-Rex ou G-Max. Ces paramètres peuvent certainement être inexacts, mais de toutes façons les calculs et graphiques présentés doivent être considérés comme des approximations qui donnent un aperçu général. Ils ne peuvent remplacer une analyse rigoureuse avec les ‘vrais’ paramètres des ‘vrais’ véhicules.
T-Rex ou G-Max avec deux gros passagers du 95ième percentile et pneus performants :
À première vue, on pourrait penser que la pire condition d’utilisation d’un 3-Roues de type T-Rex ou G-Max serait dans le cas où:
– Il s’agit d’un véhicule de ‘performance’ avec des pneus ‘performants’ dont les coefficients de friction sont de l’ordre de CfX = CfY = 1,0
– Le réservoir est plein, ce qui augmente le risque de renverser le véhicule.
– Et deux gros passagers mâles américains du 95 ième percentile sont à bord du véhicule et augmentent davantage le risque de renversement.
Dans ce cas, on obtiendrait le graphique suivant où la marge minimale de sécurité contre le renversement est de 8,31%, donc faible mais tout de même positive :

3-Roues de type T-Rex ou G-Max avec conducteur seul du 50ième percentile et pneus performants :
Le problème avec ce type de 3-Roues est qu’en réalité, le second passager avance le CG et ne diminue pas la marge minimale de sécurité contre le renversement comme dans le cas des 3-Roues à deux roues avant motrices-directrices. Au contraire, ce second passager augmente la marge minimale de sécurité contre le renversement, de sorte que c’est plutôt avec le conducteur seul qu’il pourrait y avoir risque de renversement du véhicule. Dans ce cas avec un conducteur seul, on obtient le graphique suivant :
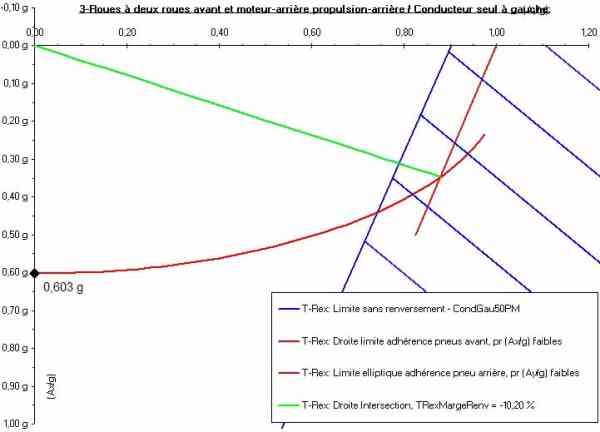
Il est clair que les courbes en rouge de capacité des pneus pénètrent dans la zone hachurée en bleu au delà de laquelle il y a renversement du véhicule.
On constate que la marge minimale de sécurité contre le renversement de ce 3-Roues est négative pour certaines valeurs des accélérations latérales et longitudinales, la marge minimale étant de –10,20%. On constate donc que le véhicule peut être renversé. Bien sûr, ce n’est qu’en tournant du côté opposé à celui du conducteur que ce risque de renversement existe. Mais ça peut survenir sur une bretelle d’autoroute où l’on tourne vers la droite tout en accélérant pour s’incérer dans le flot du trafic. Bien sûr aussi, ces résultats découlent de paramètres qui peuvent être inexacts et ne peuvent remplacer une analyse rigoureuse avec les ‘vrais’ paramètres des ‘vrais’ véhicules. Mais on peut constater que les 3-Roues avec moteur arrière actionnant la roue arrière sont plus susceptibles de se renverser lorsque le conducteur est seul à bord, tel que le montrent les images du Scorpion et du T-Rex à la section 1.3 Les 3-Roues à une seule roue arrière.
On constate aussi que l’accélération longitudinale maximale du 3-Roues de type T-Rex ou G-Max est de 0,603, parce que les passagers sont très avancés pour assurer un peu de sécurité contre le renversement. C’est plus que le 0,555g du cas du Coop-2000 avec pneus ordinaires. Mais ce n’est pas beaucoup plus, par rapport à l’accélération maximale d’une moto sportive ‘bombe’ qui avoisine le 1,0g . Aussi, c’est moins que le 0,637g du cas (non illustré ici) d’un Coop-2000 avec pneus performants et conducteur seul du 50ième percentile. Noter aussi qu’un 4-Roues comme une Corvette avec un rapport de poids avant/arrière qui est aussi de 50% / 50%, les accélérations peuvent être ‘légèrement’ meilleures parce que le centre de gravité de l’ensemble véhicule-occupant est plus élevé, ce qui agit comme dans le cas de la moto ‘bombe’ en transférant plus de poids vers les roues arrières pour assurer une accélération dépassant ‘un peu’ 0,6g .
Bien sûr, on peut tout de même avoir beaucoup de plaisir avec un 3-Roues qui accélère à 0,6g. Mais le problème est que le moteur très puissant de moto peut ‘faire plus’ et peut réussir à faire déraper la roue arrière pour entraîner un tête-à-queue, surtout si l’asphalte est mouillée.
Encore une fois:
– L’esthétique du Scorpion de Grinnall est très bonne.
– L’esthétique du T-Rex développée par Paul Deutschman et la fabrication mécanique réalisée par Daniel Campagna, sont toutes deux excellentes et offrent la possibilité d’expérimenter les sensations d’une auto de course.
– Le Cyclone est un excellent travail d’équipe réalisé par des étudiants.
– Le G-Max est une belle réalisation d’un amateur passionné.
– Et on peut avoir beaucoup de plaisir à conduire ces 3-Roues.
Mais à la base, ce type d’agencement des composantes de 3-Roues présente un risque:
– de renversement si le conducteur est seul
– et de tête-à-queue s’il y a un passager et que l’asphalte est mouillée.
On pourrait croire qu’on n’a qu’à limiter la capacité des pneus en utilisant des pneus ordinaires d’auto avec des coefficient de friction plus faibles (de l’ordre de CfX = 0,85 et CfY = 0,75). Dans ce cas, on obtient le graphique suivant :

Cette solution règle le problème du risque de renversement, mais il est clair que la limite d’accélération longitudinale maximale (Ax/gMaxi) en ligne droite en est abaissée à 0,497g. Donc le risque de tête-à-queue en est accru d’autant. Et si le véhicule est en courbe, le risque en est encore plus accru puisque l’accélération longitudinale Ax/g en est encore davantage réduite le long de la courbe en rouge qui remonte.
Un véhicule doit être sous-vireur et non sur-vireur :
Selon plusieurs auteurs, il est fortement recommandé qu’un véhicule soit sous-vireur (‘Understeer is perceived less negatively than oversteer’):
– Valkenburgh-Klein-Szostak
– “Race Car Vehicle Dynamics” de Miliken et Miliken
– Alternative Cars in the 21st Century de Riley
– Road & Track
La question du sous/sur-virage est double:
a) Question de l’augmentation des “slip angles” :
Il y a d’abord qu’à mesure qu’on tourne plus vite ou que l’accélération latérale est plus grande, les “slip angles” avant et arrière peuvent augmenter plus ou moins vite.
Pour une auto à traction avant avec quatre pneus semblables, la charge plus grande sur les roues avant fera que le “slip angle” augmentera plus vite à l’avant. Ainsi, plus on tournera vite et plus il faudra tourner le volant pour un même rayon de courbure. Ceci est avantageux pour donner au conducteur un indice de l’effort latéral qu’il demande à ses pneus.
Pour une auto à moteur et traction arrière avec quatre pneus semblables comme les anciennes Corvair, Volkswagen Coccinelle et Renault Dauphine, Renault 8 et Renault 10, le “slip angle” augmente plus vite à l’arrière. Ainsi, si on tourne dans une courbe à rayon constant et qu’on accélère, le véhicule s’orientera plus vers l’intérieur de la courbe pour tourner plus serré. C’est un comportement routier qui est moins intéressant, mais ce n’était pas inacceptable dans le cas de ces 4-Roues, la preuve étant que des millions de tels véhicules ont été vendus.
Valkenburgh-Klein-Szostak rapporte que tous les 3-Roues à deux roues avant étaient sous-vireur, incluant le Phantom qui est similaire au 3-Roues de type T-Rex ou G-Max à moteur et traction arrières. Le 3-Roues de type T-Rex ou G-Max a en plus un très gros pneu arrière unique qui est vraisemblablement rigide. Il est donc probable qu’il soit sous-vireur, du point de vue de l’augmentation des “slip angles”.
Dans le cas du COOP-2000, il est certain que le “slip angle” augmentera plus rapidement à l’avant qui supporte 75 % du poids. Par contre, le type de suspension avant et la position des rotules de direction font que les efforts latéraux en courbe augmentent le braquage des roues. Ceci se traduit par un comportement désagréable qui sera corrigé sur les prochains véhicules.
b) Question du dérapage-décrochage :
Il y a deuxièmement la question du dérapage-décrochage où les “slip angles” augmentent brusquement (“Unexpected oversteer at the limit”, à la limite d’adhérence des pneus. Ici aussi, c’est l’avant qui doit décrocher avant l’arrière pour déraper tout droit plutôt que de faire un tête-à-queue. Cette question est plus importante que la première puisqu’il s’agit non seulement de “confort” de conduite, mais de sécurité de conduite.
Dans le cas du COOP-2000, les essais effectués indiquent que l’avant est lourd et dérape (“front heavy”). Il réagit comme toutes les autos à traction avant.
Dans le cas du 3-Roues de type T-Rex ou G-Max, il est certain que la puissance du moteur et la nécessité d’avancer le CG vis-à-vis les deux roues avant qui sont seules à empêcher le véhicule de se renverser dans les courbes, se combinent pour rendre le véhicule très sensible au dérapage en courbe sur chaussée mouillée. Ce véhicule est donc potentiellement dangereux.