3.0 Evidence supporting the new steering theory:
Simply scroll down or click on one of the following pieces of evidence gleaned over the last 30 years and supporting this theory:
3.1 Testing the Torso-Arms-Handlebar mechanism yourself
3.2 Minimum stable speed calculations WITH and WITHOUT hands on the handlebar
3.3 Slow motion images when going into a turn at slow speed
3.4 Prediction of the lean angles in a steady state curve
3.5 Increased steering swiftness and sensitivity with speed
3.6 Lag or phase shift between torso and 2-Wheeler leaning angle
3.7 Isolating factors affecting steering, using a 2-Skate
3.8 Independent test carried on by the Federation Motocycliste du Quebec (FMQ) in August 2001
3.9 Crossing hands on the handlebar
3.1 Testing the Torso-Arms-Handlebar mechanism yourself:
As the saying goes: “Testing beats talking”.
So nothing beats testing the Torso-Arms-Handlebar mechanism yourself to confirm that it exists. Most motorcycles may be too heavy, but a mountain bicycle with a large handlebar does the job just fine: All you have to do is sit on the saddle and let yourself fall sideways from standstill, letting the 2-Wheeler fall down to the ground as shown on images (1) to (4) below:
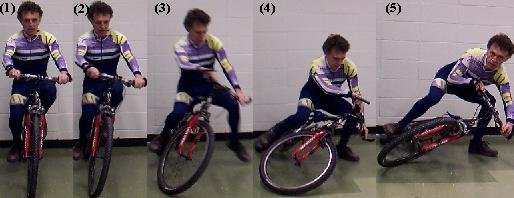
You can then experiment that:
– You are certainly not going to fall faster then the 2-Wheeler,
– It is rather very natural to keep your back more or less straight to avoid falling,
– Your arms orient the front wheel towards the side where the 2-Wheeler has fallen, as in (4) above, through the Torso-Arms-Handlebar mechanism
– And when fallen right down to the ground, you have to make a special and non-natural effort to orient the front wheel in the opposite direction as in (5) above.
3.2 Minimum stable speed calculations WITH and WITHOUT hands on the handlebar:
Based on the Body Leaning CountersteerS theory involving the Torso-Arms-Handlebar mechanism and a mathematical model developed by Ethier [1], calculations gave the following results for the minimum stable speeds of a 100cc motorcycle:
– WITH hands on the handlebar: 12,4 KPH (7.73 MPH)
– WITHOUT hands on the handlebar : 19,5 KPH (12.1 MPH)
These calculated stable speeds correlated with the speeds observed when riding. More importantly, this Body Leaning CountersteerS steering theory explains what happens at slow speeds:
A) Above the minimum speed, control of the handlebar WITH hands on is done automatically without jerky push-pull motions to stay upright, as it is experienced in day to day usage of 2-Wheelers at slow speeds.
B) The minimum stable speed WITH hands on the handlebar is lower than WITHOUT hands on the handlebar, because the rider can react on the front wheel even at standstill and, thus, without waiting for the speed to be high enough to generate gyroscopic and front fork geometry effects.
C) Moreover if the 2-Wheeler starts to fall, the rider will not simply stay vertical. He will rather react by leaning his torso in the opposite direction of the falling 2-Wheeler to avoid getting hurt. This will generate a higher centrifugal force to bring the 2-Wheeler back up faster. So the minimum stable speed WITH hands on the handlebar may be even lower.
[1] More infos and links in other section of this site: 1.4.1 Mechanical Engineering Thesis
3.3 Slow motion images when going into a turn at slow speed:
Although crude, the images below show the three steps considered by the Body Leaning CountersteerS theory when going into a turn (see other section of this site: 1.3 Three steps when going into a turn):
First left image below: The rider and 2-Wheeler are going straight ahead, along the white line on the ground floor of a gymnasium.
Step 1: The torso suddenly leans to the right so that the Torso-Arms-Handlebar mechanism steers the front wheel towards the left (white bottom-left arrow). This brings the front-tire contact-to-ground towards the left, or generates a centrifugal force (red arrow) towards the right, that pushes the 2-Wheeler towards the right in order to go into the turn.
This clearly shows that when going into a turn at slow speed, countersteering exists because it’s automatically done by the Torso-Arms-Handlebar mechanism, as predicted by the Body Leaning CountersteerS theory.
And this happens even though the rider isn’t conscious of it and even though motorcycle riding instructors often teach that countersteering is not done below 50 KPH (30 MPH)
Step 2: The red bottom line clearly shows that the tire contact-to-ground did go towards the left, crossing the white line on the ground. Also, the front wheel is oriented straight ahead and no centrifugal force is generated to hold-up the 2-Wheeler that keeps on falling to the right.
Step 3: The 2-Wheeler leans further down than the rider’s torso, which steers the front wheel towards the right throught the Torso-Arms-Handlebar mechanism, without the rider having turned the handlebar consciously. The camera angle does not show the angles as well as on the next picture.
Last right image: Going into the curve: The rider’s head and shoulder-center are to the left of the handlebar-center, so that the handlebar is automatically pushed-pulled to the right. Thus, the 2-Wheeler-and-rider system goes into a stady-state turn, with the 2-Wheeler leaning further down (white line) than the rider’s torso (red line) as predicted by the Body Leaning CountersteerS theory:


Please note that these three steps are not so easy to see by your own. But it’s very easy to at least see a trace of the wheels on the ground, similar to the bottom red curved line of these images above:
On a parking lot after rain, when part of the pavement has dried up, but there still are some rain puddles, you simply go straight along a parking lot line on the ground. This is exactly similar to going along the white line on the ground floor of the gymnasium, on the first image above-left.
Then you cross a water puddle and as soon as you passed this puddle, you suddenly through your upper body towards the right for instance (as on the images above), in order to turn right.
Then you can come back to see the trace on the ground and you can readily observe by yourself, that the traces of both front and rear wheel went towards the left as the red curved line above (only showing the rear wheel) BEFORE going towards the right.
And if you look more closely, you will even distinguish the traces of each front and rear wheel. It then becomes obvious that the tire contact-point on the ground went left, so that you and your 2-Wheeler fell towards the right. Exactly as if your finger under a vertical broom and holding it up, suddenly went towards the left, which made the broom fall to the right.
3.4 Prediction of the lean angles in a steady state curve:
The Body Leaning CountersteerS (see section 1.3 Three steps when going into a turn of this site) explains and predicts that in the third step when going into a turn, the 2-Wheeler leans further than the rider’s torso. Slow motion images can again confirm this unexpected (and unexplained by other theories) phenomenon, in a steady state curve. As can be seen, the chassis white line leans more than the torso red line:
Independent motorcycle magazines and other photographers unknowingly show lots more images of motorcycles and bicycles (white line) leaning more than the rider’s torso (red line).
Thanks here to Turbo-Press Inc (publishing Cycle Canada, Moto Journal and Le Motocycliste) for the two photos on the left, to CyclePresse, for the second photo from the right (showing Raphaël Gagné, a Quebec MTB Champion), and to Peter Marcoux for the last photo on the right (showing Ophélie Grandmont another Quebec MTB Champion):

The next three photos clearly show a motorcycle in a long and relatively steady curve. The enlargement to the right clearly shows again the chassis white line leaning more than the torso red line:

3.5 Increased steering swiftness and sensitivity with speed:
Centrifugal forces control the 2-Wheeler leaning angle through the Torso-Arms-Handlebar mechanism. Thus, the higher the speed gets, the stronger the centrifugal forces also get to correct even faster the 2-Wheeler lean angles so that it can follow faster the rider’s torso lean angle.
This explains why we only have to ‘think’ of leaning and the 2-Wheeler already follows, even though the rider is not acting faster on the handlebar.
So, the Body Leaning CountersteerS theory explains the feeling of the motorcycle almost being ‘part of your body’ at high speeds.
In reality, there always is a certain amount of error between the torso leaning and the motorcycle leaning, but it is small enough not to be felt, just like the error between the steering wheel and the front wheel, in the case of a car power steering.
3.6 Lag or phase shift between torso and 2-Wheeler leaning angle:
It’s through his trained eyes that Charles Goodyear recognized something when looking at an ugly burnt rubber garbage. And he ended up with his invention of Vulcanisation that permitted existence of all of today’s durable rubber parts.
The same goes when riding straight ahead on a bicycle or motorcycle, and you start leaning right-to-left-to-right-to-left…
A trained eye can clearly observe that there is a lag or phase shift (or phase angle shift) between the rider-torso leaning input, and the bicycle leaning output. This is typical of a positional servomechanism reaction to a sine-wave input, as involved between rider-torso leaning and 2-Wheeler leaning.
You could think that this simply is a coincidence. But if you try to have the 2-Wheeler leaning BEFORE the rider by whatever handlebar giggling, you will observe how difficult and nearly impossible it is to do.
This is all explained by the Body Leaning CountersteerS theory that can in fact predict the phase shift and even calculate it.
Let it be known that similarly to Charles Goodyear’s observation of this ugly burnt rubber garbage, the observation of this lag or phase shift precisely is what FIRST lit the light to a better understanding of 2-Wheeler steering and led to the Body Leaning CountersteerS theory.
3.7 Isolating factors affecting steering, using a 2-Skate:
Important factors having an effect on 2-Wheeler steering are:
– Front fork and suspension geometry
– Gyroscopic reactions and counter-reactions
– Power transmitted to the rear wheel
– And the Torso-Arms-Handlebar mechanism
 In order to isolate the effect of the Torso-Arms-Handlebar mechanism and determine its importance, a special ‘2-Skate’ vehicle was developed:
In order to isolate the effect of the Torso-Arms-Handlebar mechanism and determine its importance, a special ‘2-Skate’ vehicle was developed:
A) The front fork angle is zero. So the first factor above, Front fork and suspension geometry, is eliminated.
B) Skates replace the two wheels. So the second and third factors, Gyroscopic reactions and Power to the rear wheel, are thus also eliminated.
Thus, the only factor left is the Torso-Arms-Handlebar mechanism.
But does it work?
 Well at least, the mechanism orients the front skate in the opposite direction from the rider’s torso leaning, exactly as for a bicycle or motorcycle:
Well at least, the mechanism orients the front skate in the opposite direction from the rider’s torso leaning, exactly as for a bicycle or motorcycle:
.
But the vehicle really looks unstable, more so since all the factors known to be essential for good steering were eliminated. So can anyone really ride it?
 The answer is that it’s as stable as a motorcycle or bicycle, as soon as it has been given momentum and a minimum speed is maintained.
The answer is that it’s as stable as a motorcycle or bicycle, as soon as it has been given momentum and a minimum speed is maintained.
But real skeptics will still think that there out to be something else holding up the vehicle. How could they be convinced?
There is an answer here again: Since the Torso-Arms-Handlebar mechanism is the only active factor, an additional proof of its importance would be to eliminate it and confirm that the vehicle will not be stable any more.
It’s precisely what happens when the handlebar is let go. There is no gyroscopic reaction or front fork geometry that can act on the front skate, so it simply keeps on going in the same direction without correcting its orientation to support the vehicle:

Hard for skeptics…
Higher quality video Hands-ON
Higher quality video Hands-OFF
3.8 Independent test carried on by the Federation Motocycliste du Quebec (FMQ) in August 2001:
A) The test itself:
‘LE MOTOCYCLISTE’ is the official magazine of the Federation Motocycliste du Quebec (FMQ). Volume 8, No. 5 of autumn 2001, reports that in August 8th and 9th, 2001, thirty motorcyclists took part in a ‘safety event 2001’ of the FMQ on countersteering. It was organized in cooperation with the Societe de l’Assurance Auto du Quebec (The SAAQ that insures a few million car, truck, motorcycle… drivers in Quebec) and Promocycle.
In a motorcycle driver’s license test, candidates must ride towards an instructor simulating a 3 meter (10 foot) wide obstacle. They must then turn right or left according to the instructor’s sudden indication, when they get below 10 meters from the virtual obstacle. Many riders fail the test.
The thirty motorcyclists were separated in three groups where:
– At first, everyone went through the test without any specific recommendation.
– Then each group were given a different training.
– Finally, everyone repeated the test to see if the training was of any use.
The results reported in the LE MOTOCYCLISTE magazine can be translated as follows:
… a first group of motorcyclists performed worse after they were trained according to the ‘known and regular’ countersteering technique. A third group practiced the test-maneuver without any specific recommendation or training. They also fared worse when repeating the test. Only the second group that had received the instruction to “project their torso towards where they want to go while pushing on the handlebar”, fared better when repeating the test.
B) Support to the Body Leaning CountersteerS theory:
These results clearly support the Body Leaning CountersteerS theory’s explanations:
– Group 1: The countersteering technique used, has a cerebral and contradictory aspect that risks slowing down and even fooling the rider’s reactions in the case of an emergency, which is simulated by this test.
– Group 2: In the case of an emergency, a rider must rigidify his arms and throw his body towards where he wants to go in order to let the Torso-Arms-Handlebar mechanism work rapidly, precisely and adequately to avoid the obstacle. That’s what was taught this second group that fared better in the test.
– Group 3: If a rider knows nothing about the countersteering technique or the Body Leaning CountersteerS theory, as in the third group, he may try to avoid the obstacle with his arms kept flexible. Or he may try to avoid the obstacle by turning the front wheel towards where he wants to go as he does in a car. So the rider may not react fast enough or he may go in the wrong direction in the case of an emergency, as simulated by this test.
Note that the riders without any specific recommendation or training could have fared better during the final test. The circumstances and instructions for the tests might have stressed them more to reduce their performance. But this additional stress represents better than the test itself the stress involved in a real road emergency. And this highlights the beneficial simplicity and reliability of the Body Leaning CountersteerS‘ recommendations. We don’t have to think, we only have to save ourselves by throwing our head and body away from trouble. And we can practice an enjoying routine. (See section Recommendation to increase driving precision and safety)
3.9 Crossing hands on the handlebar:
It’s often thought that when the hands are put on the handlebars, the human brain rapidly controls the arms to act on the handlebar in order to insure stability and steering of a 2-Wheeler.
A simple test can show that it’s not true: While riding at slow speed and being very careful, both hands can be crossed right-left on the handlebar. Steering immediately becomes acrobatic and almost impossible. So you have to be very careful when checking this phenomenon because the 2-Wheeler can fall abruptly and you can get hurt. Note that at high speeds, the gyroscopic reactions and counter-reactions help the 2-Wheeler stay up better, but steering still is very difficult and the inversion may be even more catastrophic at higehr speed.
The Backwards Brain Bicycle YouTube video (of the Smarter Every Day series by Engineer Destin Sandlin), clearly shows this phenomenon.
Another example is given at sub-section 5.4 Development of a New Interface Concept (NIC) for steering with a rider’s torso held by seatbelts of my Dynamik23 web site: https://dynamik23.com/home-2/2wheels/development-recommendation/#Development-New-Interface-Concept-NIC
Obviously, the brain hardly adapts to this simple inversion, even if you practise a lot. So the brain hardly holds up the 2-Wheeler all by itself. The explanation of this erratic behavior can be found at stand still: If the torso leans to the right, for instance, the front wheel is also oriented to the right which is the opposite of the normal Torso-Arms-Handlebar mechanism. So when the 2-Wheeler falls, the front wheel is not oriented to bring it back up, it’s rather oriented to make it fall even faster. In servomechanism terms, it’s obvious that the error detector gives an inverted signal, which fools the mechanism.
Electro-mechanical engineers working on small servomechanisms using Operational Amps (making mathematical operations like addition and subtraction) are used to that, since these Op-Amps often invert signs. With a few of these inversions in their servomechanism loops, they don’t know what sign they will end-up with. Such person observing a newly installed malfunctioning circuit, will in a fraction of a second, invert the sign of a single variable and correct the problem. Which is totally surprising for a mechanical engineer unable to change sign of a set of gear sets without total redesign consuming a lot more time.
A possible adaptation for the brain could be for it to associate a ‘strong’ torso rotation to the right when leaning to the right, as though it’s his shoulders-plane or opposite-shoulder – left here to go right – that has to be thrown in the direction where he wants to go. Thus, he will push on the left handle and orient the handlebar to the right, resulting in an opposite orientation of the front wheel to the left, as the normal TAH normally works to do countersteering. This adaptation would then simulate a normal Torso-Arms-Handlebar mechanism. If this corrects the problem of Destin Sandlin’s Backwards Brain Bicycle, then the rider would obviously have to retrain himself when going back to a regular bicycle, which is what Destin Sandlin reports.